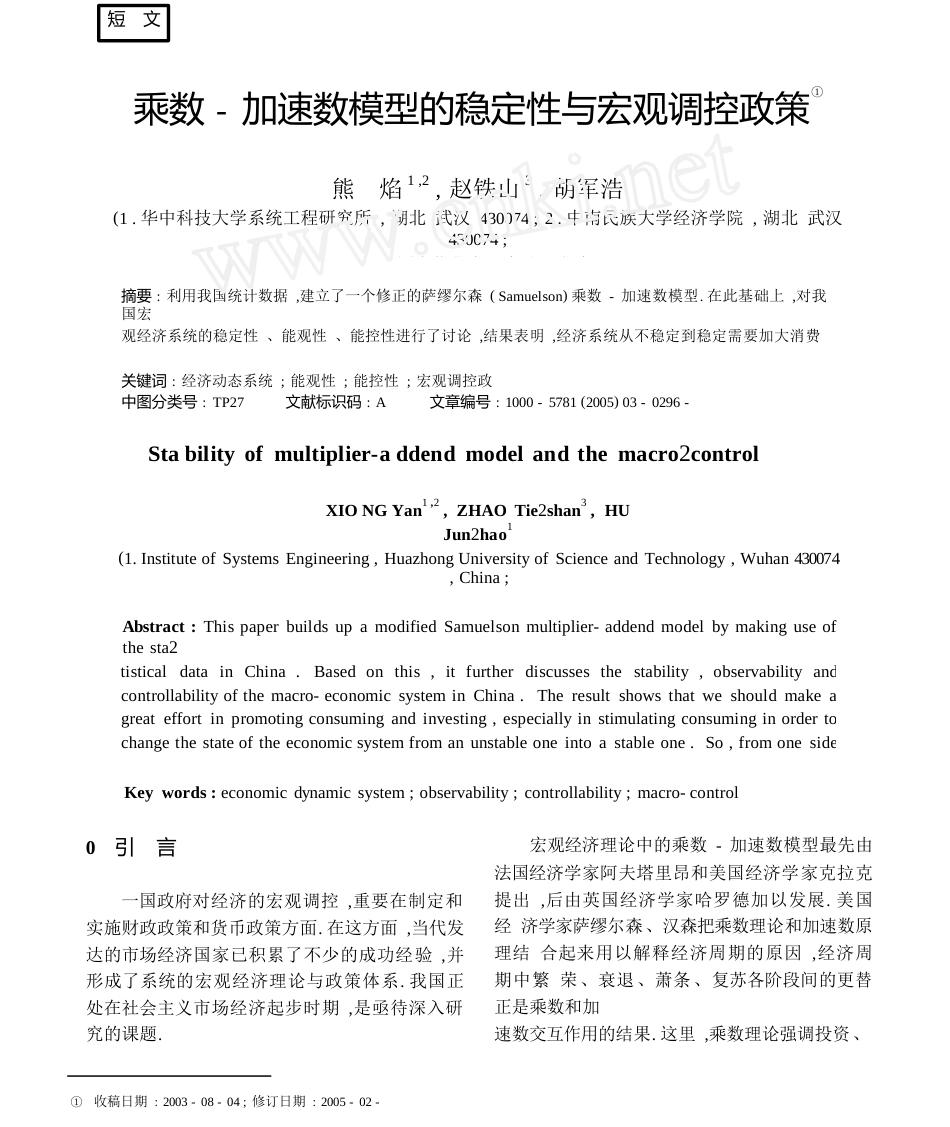
①乘数-加速数模型的稳定性与宏观调控政策焰1,2,赵铁山3,胡军浩1熊(1.华中科技大学系统工程研究所,湖北武汉430074;2.中南民族大学经济学院,湖北武汉430074;3.中国电信北京研究院,北京摘要:利用我国统计数据,建立了一个修正的萨缪尔森(Samuelson)乘数-加速数模型.在此基础上,对我国宏观经济系统的稳定性、能观性、能控性进行了讨论,结果表明,经济系统从不稳定到稳定需要加大消费和投资的力度,尤其应该刺激消费.从一个侧面论证了我国近年来宏观经济调控政策的正确性.关键词:经济动态系统;能观性;能控性;宏观调控政策中图分类号:TP27文献标识码:A文章编号:1000-5781(2005)03-0296-03Stabilityofmultiplier-addendmodelandthemacro2controlpoliciesXIONGYan1,2,ZHAOTie2shan3,HUJun2hao1(1.InstituteofSystemsEngineering,HuazhongUniversityofScienceandTechnology,Wuhan430074,China;Abstract:ThispaperbuildsupamodifiedSamuelsonmultiplier-addendmodelbymakinguseofthesta2tisticaldatainChina.Basedonthis,itfurtherdiscussesthestability,observabilityandcontrollabilityofthemacro-economicsysteminChina.Theresultshowsthatweshouldmakeagreateffortinpromotingconsumingandinvesting,especiallyinstimulatingconsuminginordertochangethestateoftheeconomicsystemfromanunstableoneintoastableone.So,fromoneside,thepaperexpoundsthatthemacro-Keywords:economicdynamicsystem;observability;controllability;macro-controlpolicies0引言宏观经济理论中的乘数-加速数模型最先由法国经济学家阿夫塔里昂和美国经济学家克拉克提出,后由英国经济学家哈罗德加以发展.美国经济学家萨缪尔森、汉森把乘数理论和加速数原理结合起来用以解释经济周期的原因,经济周期中繁荣、衰退、萧条、复苏各阶段间的更替正是乘数和加速数交互作用的结果.这里,乘数理论强调投资、一国政府对经济的宏观调控,重要在制定和实施财政政策和货币政策方面.在这方面,当代发达的市场经济国家已积累了不少的成功经验,并形成了系统的宏观经济理论与政策体系.我国正处在社会主义市场经济起步时期,是亟待深入研究的课题.①收稿日期:2003-08-04;修订日期:2005-02-08.短文—297—第3期熊焰等:乘数-加速数模型的稳定性与宏观调控政策中的倍增作用;而加速数原理说明收入的增减会引起投资成倍地增减,且引起投资更大幅度地增减或者说加速度增减.简言之,乘数理论是关于投资对国民收入作用的理论,而加速数理论是关于国民收入对投资反作用的理论,两者结合使国民经济构成了一个宏观经济动力学系统,并以此说明经济的周期波动的成因,政府可通过其财政政策及货币政策对其经济运行状态进行调控.萨缪尔森的乘数-加速数模型可以表示为Yt=Ct+ItCt=C0+bYt-1确定我国乘数-加速数模型的参数.模型估计的结果为Ct+1It+1CtIt0.70700.295400.82920.9357=+ut-2.4622CtYt=(1,1)It其中:Ct、ut分别表示t期的消费和政府对国有单位固定资产投资;(Ct,It)T为状态变量;政府对国有单位固定资产投资ut为控制变量;国民收入уt为输出变量.从根轨迹图和Nyquist图,都可以看出,系统有一个负零点,两个正极点,系统为不稳定状态.为了进一步说明这点,把方程写成零极点It=I0+K(Ct-Ct-1)式中的Yt、Ct、It,为第t期的国民收入、消费和投资.萨缪尔森在假定C0、I0为常数的前提下研究第t期国民收入受消费和投资的影响以及由第t期和第t-1期消费的差额所决定的投资.在萨缪尔森工作的基础上,英国经济学家希克斯进一步完善了乘数理论和加速数理论,他认为萨缪尔森模型中的自发投资I0应该以常数的增长率g随时间t而增加,即A0(1+g)t,而不是常数I0.参考有关文献可将萨缪尔森宏观经(s+0.1220),增益模型G(s)=(s-0.3134)(s-1.3290)可以看出系统有两个正极点,该系统处于不稳定状态,见图1、2.=α1Ct-1+α2Yt-1CtIt=γut-1+β(Ct-Ct-1)经过整理后上述模型可用矩阵形式表示为α1+α2β(α1+α2-1)α2βα2Ct+1It+1CtIt0=+utγ图1根轨迹图CtItYt=(11)我国1978—1994年宏观经济乘数-速数模型的建立与分析加1将以上模型写成最小二乘格式zL(k)=HT(k)θ+e(k)L用最小二乘方法求解上述方程,得...