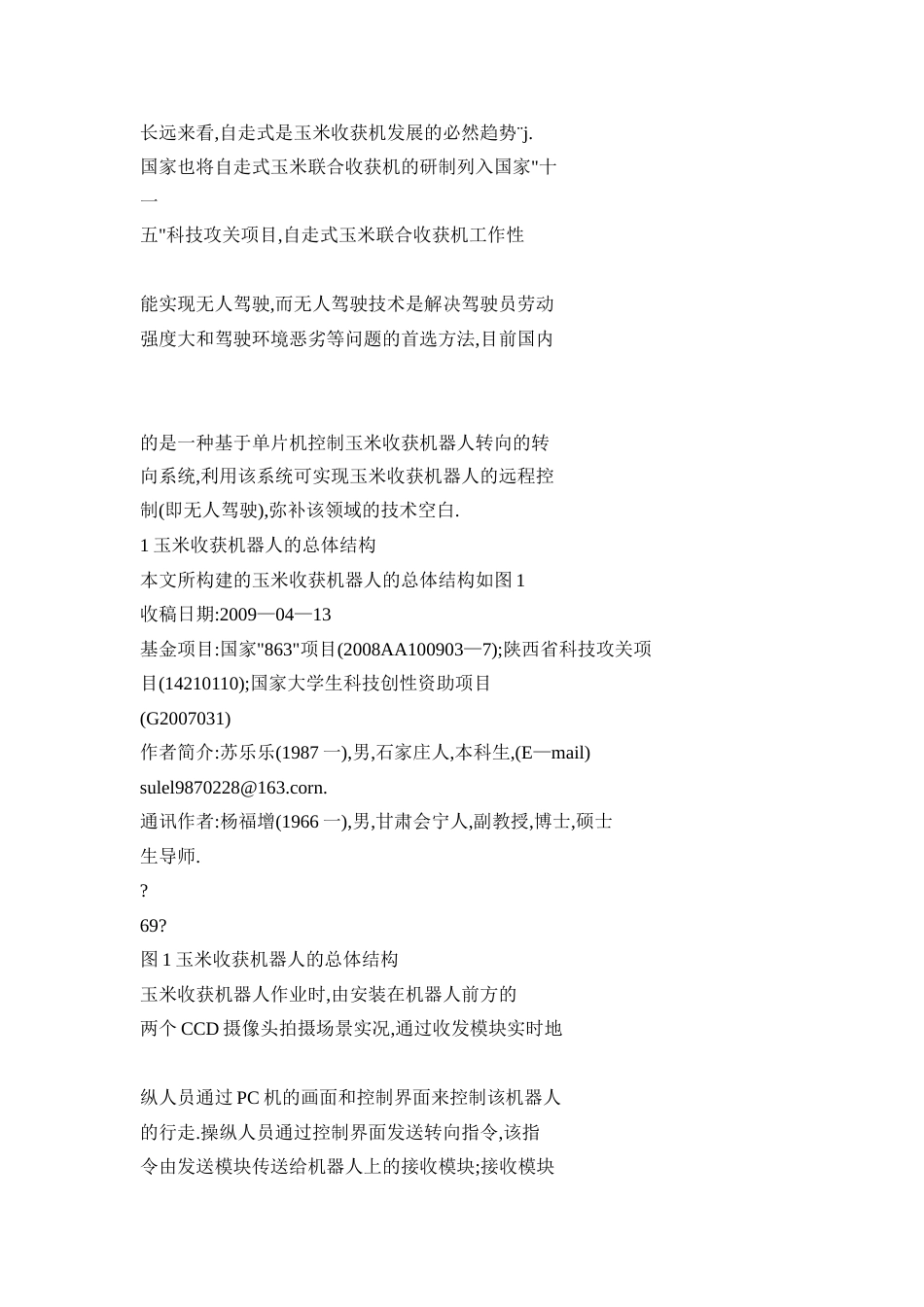
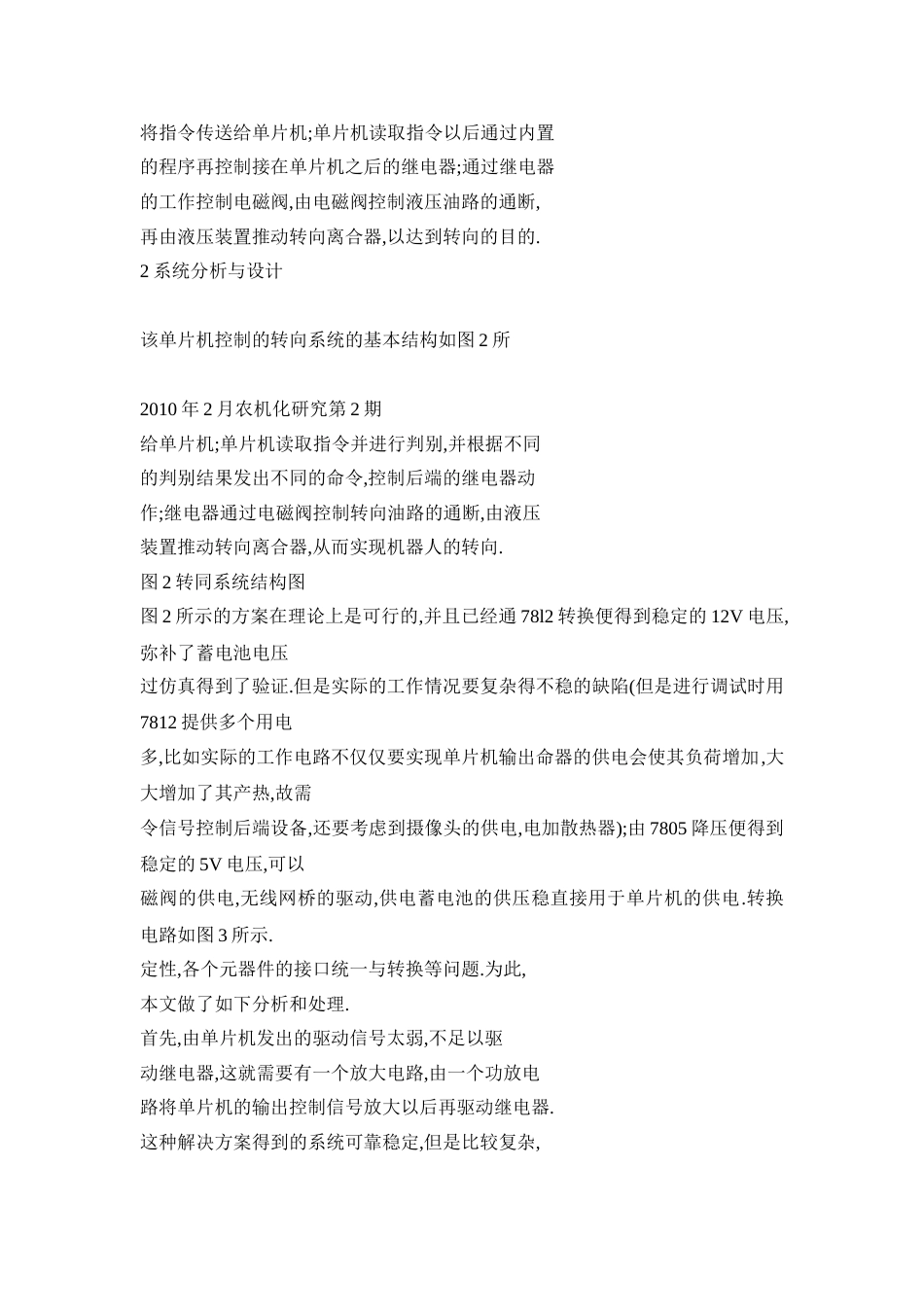
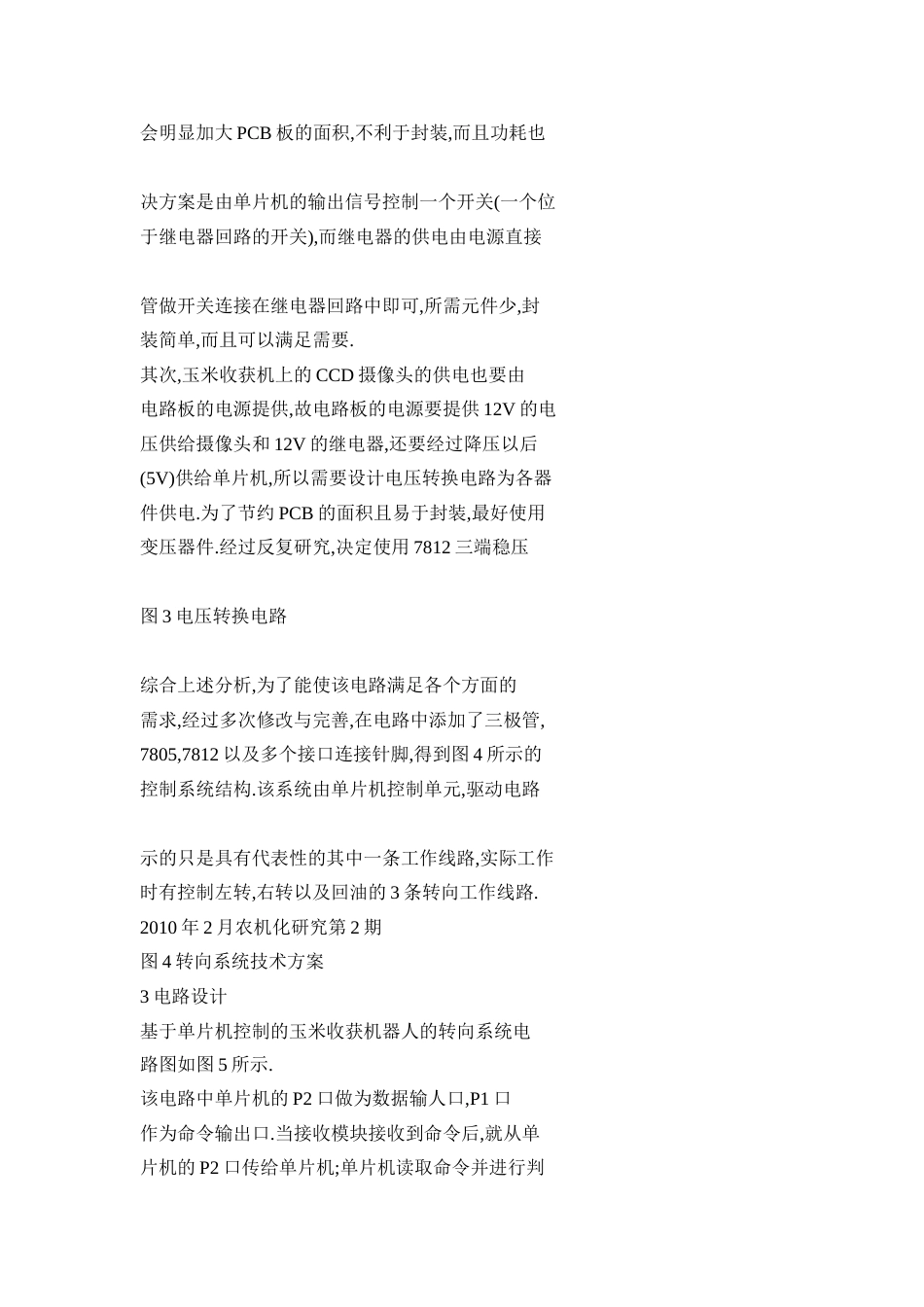
基于单片机控制的玉米收获机器人转向系统2010年2月农机化研究第2期基于单片机控制的玉米收获机器人转向系统苏乐乐,杨福增,徐建,徐秀栋(西北农林科技大学机电学院,陕西杨凌712100)摘要:玉米作为我国主要农作物之一,其收获劳动强度大,作业环境恶劣,是整个玉米生产中最耗时和费力的环节,改善驾驶员的工作环境,减小劳动强度成了玉米收获机发展的必然趋势,即通过研制相应的机器人来实现玉米收获机的无人驾驶.为此,介绍了一种基于单片机控制的玉米收获机器人的转向系统,包括该系统的组成结构,功能实现以及软硬件设计.通过在电脑上进行模拟仿真以及现场的安装调试,最终研制出了一种基于单片机控制的转向系统,该系统简单稳定,可用于多种农业机械的转向控制.关键词:玉米收获机器人;转向控制;单片机:TF~24;S126文献标识码:A:1003—188X(2010)02-0069—050引言所示.随着玉米收获机械化程度的提高,玉米收获机的自动化也得到了相应的发展.目前,玉米收获机的主中,自走式玉米收获机是一种专门用来从事玉米收获作业的装备,具备行走,动力和操纵控制等系统,其技术含量高,结构复杂,可靠性差,价格高,且目前市场需求量不大,生产企业较少,多数处于试制状态,但从长远来看,自走式是玉米收获机发展的必然趋势¨j.国家也将自走式玉米联合收获机的研制列入国家"十一五"科技攻关项目,自走式玉米联合收获机工作性能实现无人驾驶,而无人驾驶技术是解决驾驶员劳动强度大和驾驶环境恶劣等问题的首选方法,目前国内的是一种基于单片机控制玉米收获机器人转向的转向系统,利用该系统可实现玉米收获机器人的远程控制(即无人驾驶),弥补该领域的技术空白.1玉米收获机器人的总体结构本文所构建的玉米收获机器人的总体结构如图1收稿日期:2009—04—13基金项目:国家"863"项目(2008AA100903—7);陕西省科技攻关项目(14210110);国家大学生科技创性资助项目(G2007031)作者简介:苏乐乐(1987一),男,石家庄人,本科生,(E—mail)sulel9870228@163.corn.通讯作者:杨福增(1966一),男,甘肃会宁人,副教授,博士,硕士生导师.?69?图1玉米收获机器人的总体结构玉米收获机器人作业时,由安装在机器人前方的两个CCD摄像头拍摄场景实况,通过收发模块实时地纵人员通过PC机的画面和控制界面来控制该机器人的行走.操纵人员通过控制界面发送转向指令,该指令由发送模块传送给机器人上的接收模块;接收模块将指令传送给单片机;单片机读取指令以后通过内置的程序再控制接在单片机之后的继电器;通过继电器的工作控制电磁阀,由电磁阀控制液压油路的通断,再由液压装置推动转向离合器,以达到转向的目的.2系统分析与设计该单片机控制的转向系统的基本结构如图2所2010年2月农机化研究第2期给单片机;单片机读取指令并进行判别,并根据不同的判别结果发出不同的命令,控制后端的继电器动作;继电器通过电磁阀控制转向油路的通断,由液压装置推动转向离合器,从而实现机器人的转向.图2转同系统结构图图2所示的方案在理论上是可行的,并且已经通78l2转换便得到稳定的12V电压,弥补了蓄电池电压过仿真得到了验证.但是实际的工作情况要复杂得不稳的缺陷(但是进行调试时用7812提供多个用电多,比如实际的工作电路不仅仅要实现单片机输出命器的供电会使其负荷增加,大大增加了其产热,故需令信号控制后端设备,还要考虑到摄像头的供电,电加散热器);由7805降压便得到稳定的5V电压,可以磁阀的供电,无线网桥的驱动,供电蓄电池的供压稳直接用于单片机的供电.转换电路如图3所示.定性,各个元器件的接口统一与转换等问题.为此,本文做了如下分析和处理.首先,由单片机发出的驱动信号太弱,不足以驱动继电器,这就需要有一个放大电路,由一个功放电路将单片机的输出控制信号放大以后再驱动继电器.这种解决方案得到的系统可靠稳定,但是比较复杂,会明显加大PCB板的面积,不利于封装,而且功耗也决方案是由单片机的输出信号控制一个开关(一个位于继电器回路的开关),而继电器的供电由电源直接管做开关连接在继电器回路中即可,所需元件少,封装简单,而且可以满足需要.其次,玉米收获机上的CCD摄像头的供电也要由电路板的电源提供,故电路板的电源要提供12V的电压供给摄像头和12V的继电器,还要经过降压以后(5V...