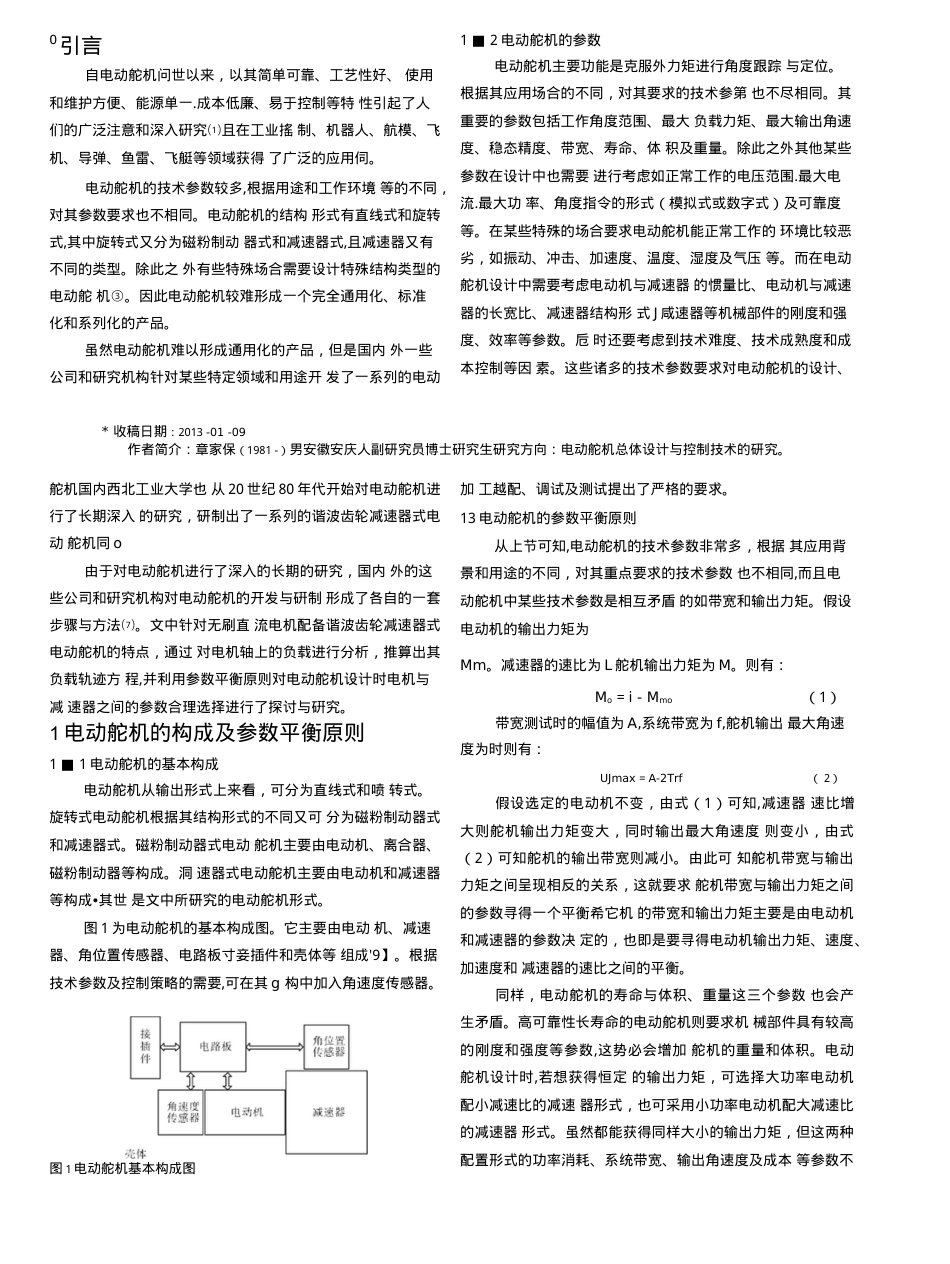
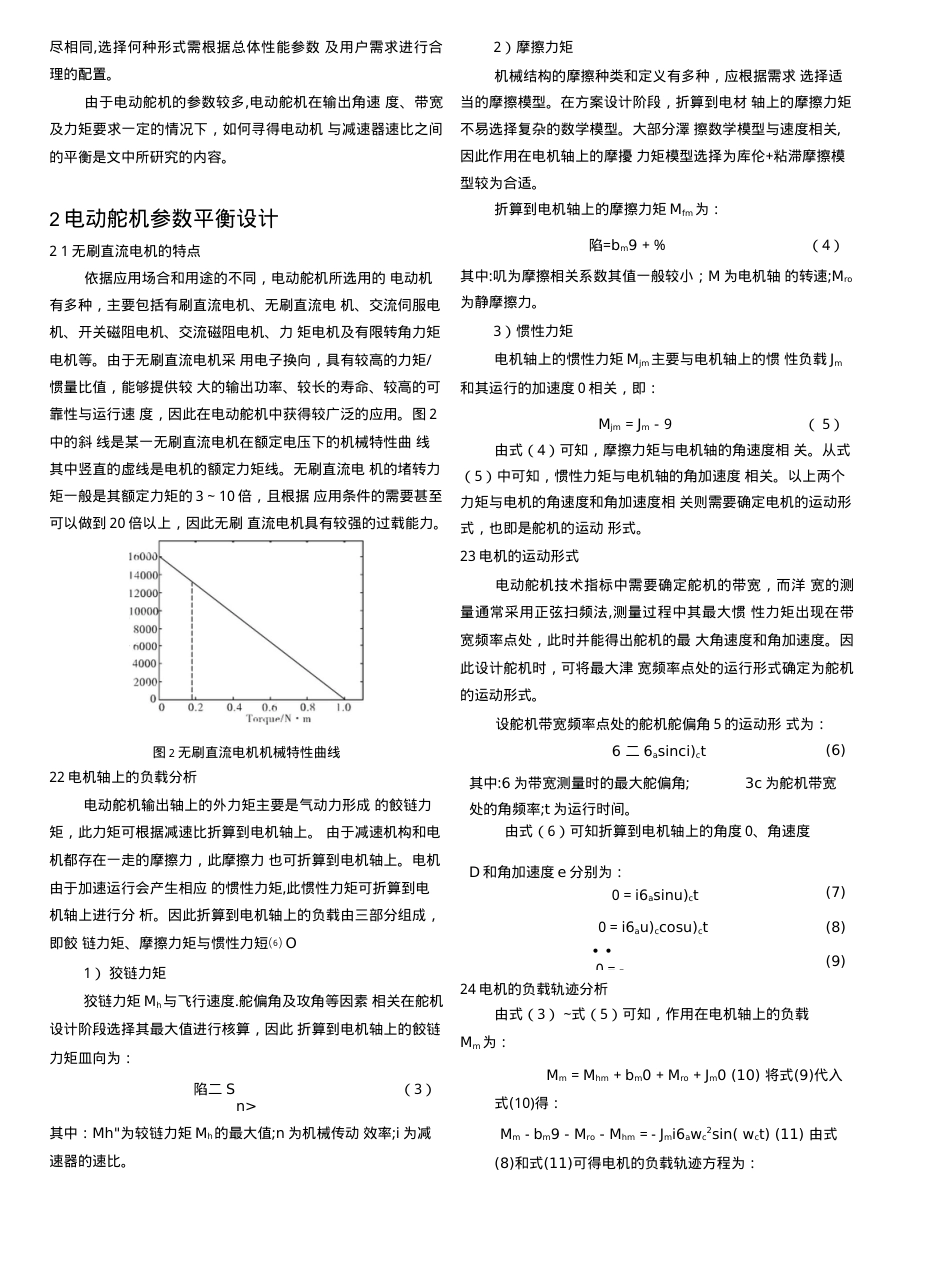
电动舵机的参数平禽吸计章家保(中国科学院长春光学精密机械与物理研究所长春130033)摘要:在进行电动舵机设计时,为防止其中部分参数不平衡而导致系统性能变差或难以实现Kt选用的电机及减速器的参数如何平衡进行了硏究。先介绍了电动舵机基本构成、参数类型及参数平衡的基本原则。接着分析了折算到电机轴上的负载力矩推导出了负载轨迹运动方程。然后,进行了设计实例分析,根据参数平衡原贝!对电机进行了选定,并给出了选用电机的两个原则。最后,对样机进行了实验测试。结果表明:舵机角速度为145°/s;输岀力矩为20N-m;带宽达10.72Hz。满足了电动舵机系统设计的技术参数要求。关键词:电动舵机;参数平衡;电机负载轨迹中图分类号:V249.122文献标志码:AParameterBalanceDesignofElectromechanicalActuatorZHANGJiabao(ChangchunInst让uteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China)Abstract:Duringdesignofelectromechanicalactuator,inordertopreventsomeparametersimbalanee,whichcouldcausethesystemper-formancetogetworseorthesystemcouldbedifficulttoachieveTheissueofhowtobalancethechosenparametersofthemotorandgearreducerhasbeenresearched.Firstly,thebasiccomponents,parametertypeandtheprincipleofparameterbalanceofelectromechanicalactuatorwereintroducedSecondly,theequationofthemotorloadmotiontrajectorywasdeducedonthebasisofanalysisofthemotorshaftloadtorque,whichwasconvertedbytheactuator.Thirdly,anexampleofelectromechanicalactuatordesignwasgivenAccordingtotheprincipleofparametersbalanceinthemotorloadmotiontrajectory,themotorwasselectedandtwoprinciplesintheselectionofmotorwereproposed.Finally,anelectromechanicalactuatorprototypewastestedandanalyzedExperimentalresultsindicatethatactuator'smaximumangularvelocityis145'/s.maximumoutputtorqueis20N-mandsystembandwidthisupto10.72HzTheresultsmeetthetechnicalparametersrequirementsoftheelectromechanicalactuatorsystemdesign.Keywords:electromechanicalactuator;parameterbalanee;motorloadtrajectory0引言自电动舵机问世以来,以其简单可靠、工艺性好、使用和维护方便、能源单一.成本低廉、易于控制等特性引起了人们的广泛注意和深入硏究⑴且在工业搖制、机器人、航模、飞机、导弹、鱼雷、飞艇等领域获得了广泛的应用伺。电动舵机的技术参数较多,根据用途和工作环境等的不同,对其参数要求也不相同。电动舵机的结构形式有直线式和旋转式,其中旋转式又分为磁粉制动器式和减速器式,且减速器又有不同的类型。除此之外有些特殊场合需要设计特殊结构类型的电动舵机③。因此电动舵机较难形成一个完全通用化、标准化和系列化的产品。虽然电动舵机难以形成通用化的产品,但是国内外一些公司和研究机构针对某些特定领域和用途开发了一系列的电动舵机国内西北工业大学也从20世纪80年代开始对电动舵机进行了长期深入的研究,研制出了一系列的谐波齿轮减速器式电动舵机同o由于对电动舵机进行了深入的长期的研究,国内外的这些公司和硏究机构对电动舵机的开发与硏制形成了各自的一套步骤与方法⑺。文中针对无刷直流电机配备谐波齿轮减速器式电动舵机的特点,通过对电机轴上的负载进行分析,推算出其负载轨迹方程,并利用参数平衡原则对电动舵机设计时电机与减速器之间的参数合理选择进行了探讨与硏究。1电动舵机的构成及参数平衡原则1■1电动舵机的基本构成电动舵机从输出形式上来看,可分为直线式和喷转式。旋转式电动舵机根据其结构形式的不同又可分为磁粉制动器式和减速器式。磁粉制动器式电动舵机主要由电动机、离合器、磁粉制动器等构成。洞速器式电动舵机主要由电动机和减速器等构成•其世是文中所研究的电动舵机形式。图1为电动舵机的基本构成图。它主要由电动机、减速器、角位置传感器、电路板寸妾插件和壳体等组成'9】。根据技术参数及控制策略的需要,可在其g构中加入角速度传感器。图1电动舵机基本构成图1■2电动舵机的参...