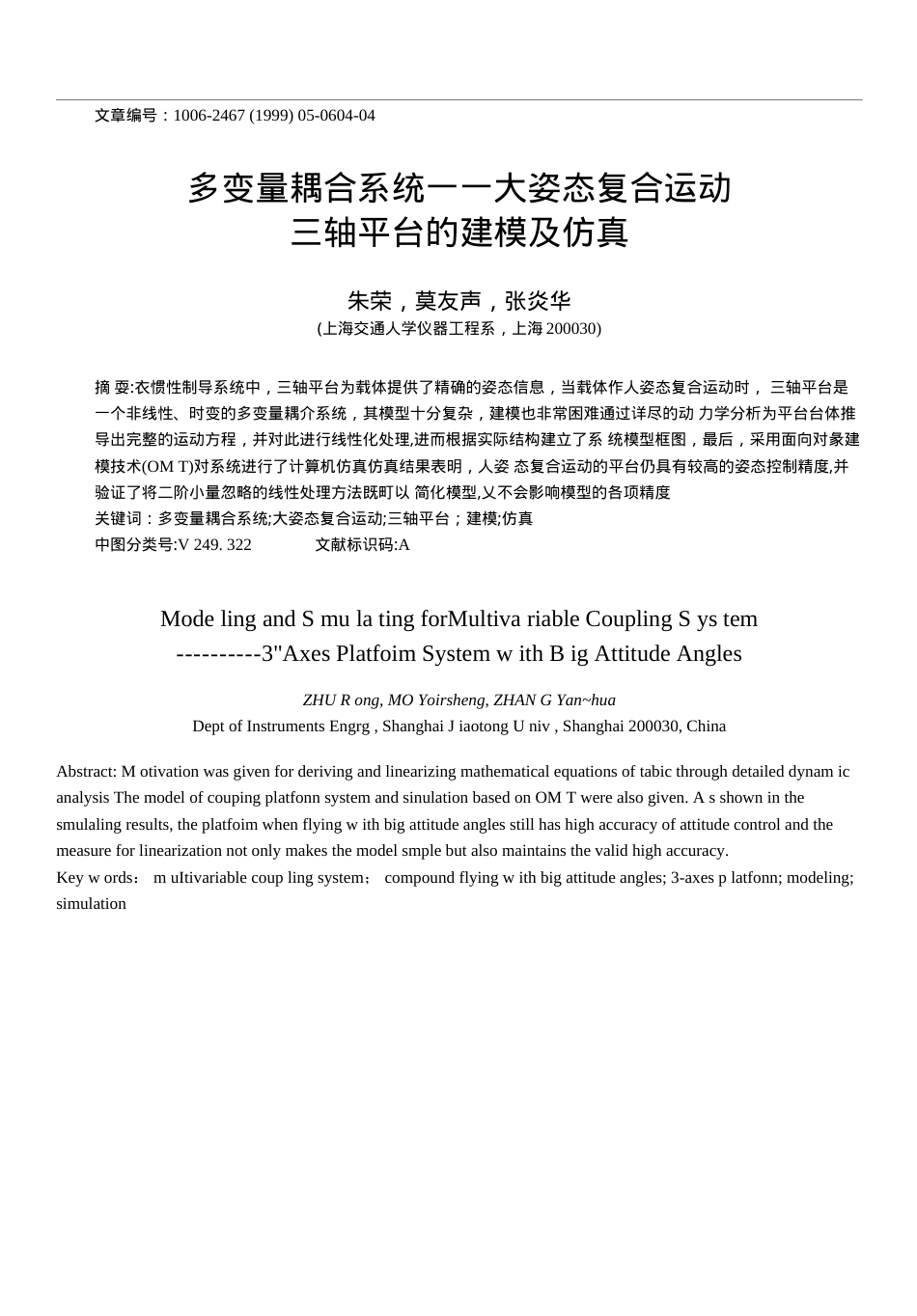
文章编号:1006-2467(1999)05-0604-04多变量耦合系统一一大姿态复合运动三轴平台的建模及仿真朱荣,莫友声,张炎华(上海交通人学仪器工程系,上海200030)摘耍:衣惯性制导系统中,三轴平台为载体提供了精确的姿态信息,当载体作人姿态复合运动时,三轴平台是一个非线性、时变的多变量耦介系统,其模型十分复杂,建模也非常困难通过详尽的动力学分析为平台台体推导出完整的运动方程,并对此进行线性化处理,进而根据实际结构建立了系统模型框图,最后,采用面向对彖建模技术(OMT)对系统进行了计算机仿真仿真结果表明,人姿态复合运动的平台仍具有较高的姿态控制精度,并验证了将二阶小量忽略的线性处理方法既町以简化模型,乂不会影响模型的各项精度关键词:多变量耦合系统;大姿态复合运动;三轴平台;建模;仿真中图分类号:V249.322文献标识码:AModelingandSmulatingforMultivariableCouplingSystem----------3"AxesPlatfoimSystemwithBigAttitudeAnglesZHURong,MOYoirsheng,ZHANGYan~huaDeptofInstrumentsEngrg,ShanghaiJiaotongUniv,Shanghai200030,ChinaAbstract:MotivationwasgivenforderivingandlinearizingmathematicalequationsoftabicthroughdetaileddynamicanalysisThemodelofcoupingplatfonnsystemandsinulationbasedonOMTwerealsogiven.Asshowninthesmulalingresults,theplatfoimwhenflyingwithbigattitudeanglesstillhashighaccuracyofattitudecontrolandthemeasureforlinearizationnotonlymakesthemodelsmplebutalsomaintainsthevalidhighaccuracy.Keywords:muItivariablecouplingsystem;compoundflyingwithbigattitudeangles;3-axesplatfonn;modeling;simulation在惯性制导系统中,三轴陀螺稳定平台为加速目前,对三轴平台的动态建模仅停留在载体飞度计提供了稳定的测量坐标系,保证了加速度计的疋确取向,并能精确地给出载体相对测量坐标系的姿态信息从而实现对载体的姿态控制三轴平台有3个稳定轴,相对载体有3个自由度,因此可以保证平台台体不受载体角运动的影响而稳定在惯性空行的情况,此时平台系统的三轴是3条独立冋路为满足载体对大姿态角复合运动的进一步要求,建立三轴平台在载休大姿态复合运动时的动态模型显得十分必要由于载体的人姿态复介运动造成三轴冋路相互耦合,形成多变量耦合系统,使得模型建立十问,即使有运动,其免振荡也十分微小,从而为装在平台上的惯性仪表捉供良好的工作条件收稿日期:1998-10-13作者简介:朱荣(1964),女,讲师分困难至今,国内外还没育这方面的研究报道木文为该系统建立完整的框图模型,并采用血向対象建模技术(OMT)对系统进行计算机仿真1三轴平台的构成和工作原理如图1所示,平台系统主要由六部分组成:框架(内、外)、平台台体、陀螺仪、朋标变换、校止网络和力矩电朋L当有外力矩作用在平台系统上时,稚架将带动台体一起转动,使台体产生一相对于惯性坐标系的角速度,安装衣台体上的陀螺仪敏感到这一角速度时,其浮子将绕输出轴进动,产生进动角;随着角度的增长信号传感器产生一与进动角成比例的电压信号,经过放人、坐标变换和校正,加到力矩电机上;力矩电机输出力矩,其方向与外力矩相反,如此形成闭环冋路cossinCOS0sin0QtanQ009secQsecsinQcosQsinQtancos00e图1平台系统结构图Fig1SchematicdiagramofpldtfbnnsystancosQsecQ00sin0tanQcos0sinBsecsin0secQ00(1)(JQ>x■gf⑵2三轴平台的模型方块图21框架之间的介速度变换首先建立三轴平台相应的朋标系:基座处标系Oxpoypozpo,外框架坐标系OxP\yP\z.p\,内框架坐标系OxP2yP2Zp2,台体坐标系OXpypZp-四坐标系分别与基座(载体)、外框架、内框架和台体相固联,其中OZM为外框架轴,0小,2为内框架轴,0*为台体轴初始时,4个坐标系重合(相应各坐标轴重合),随后四坐标系Z间作相对转动,设8、8、0分别为基座相对外框架沿OZM轴、外框架相对内框架沿0"2轴、内框架相对台体沿0升轴的转角,乂称为框架角,各坐标系Z间的关系如图2所示基座相对惯性坐标系的位置由姿态角(偏航灰滚动X俯仰0确定设:分别为台体绕US、"轴的绝对角速度;⑴*2、⑴>2、©2分别为内框架绕Xp2、yp2、Zp2轴的绝对角速...