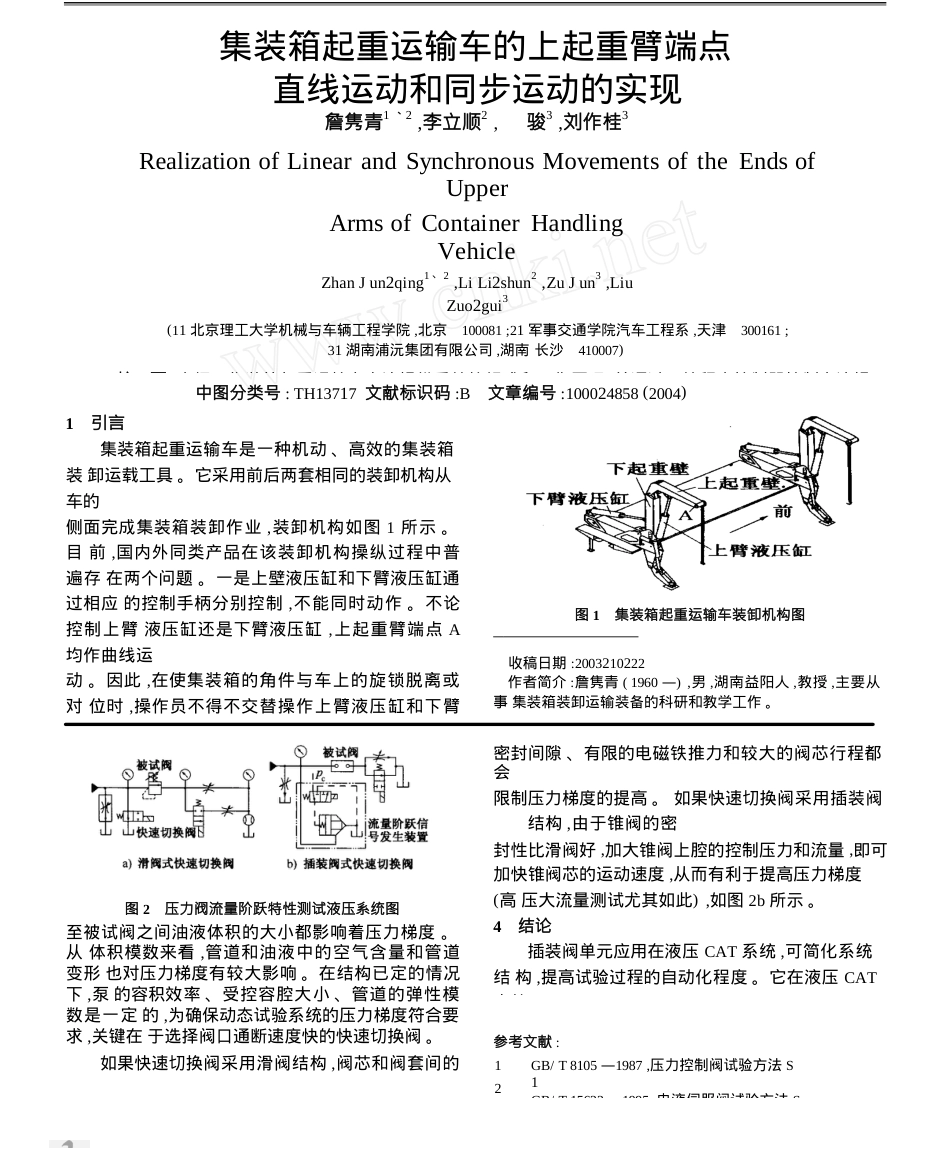
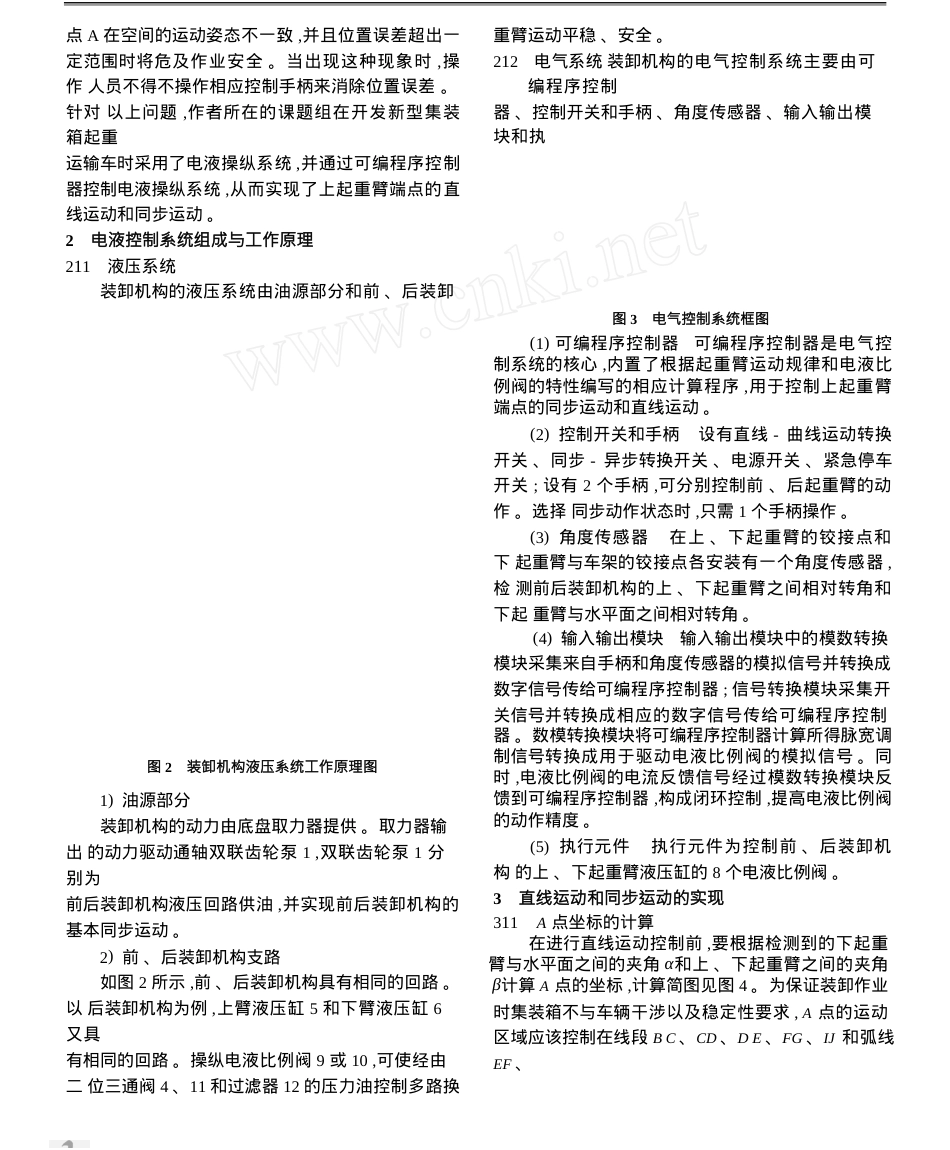
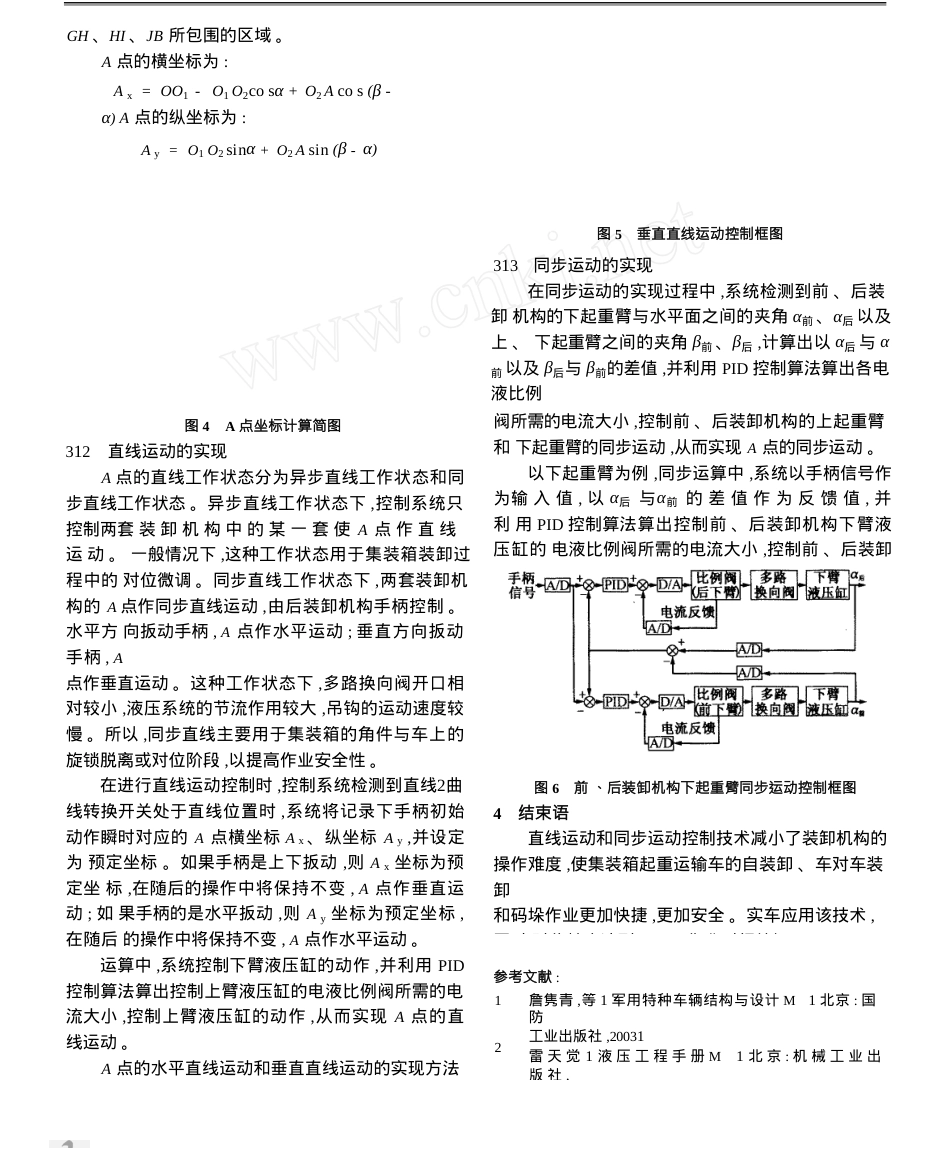
集装箱起重运输车的上起重臂端点直线运动和同步运动的实现詹隽青1、2,李立顺2,祖骏3,刘作桂3RealizationofLinearandSynchronousMovementsoftheEndsofUpperArmsofContainerHandlingVehicleZhanJun2qing1、2,LiLi2shun2,ZuJun3,LiuZuo2gui3(11北京理工大学机械与车辆工程学院,北京100081;21军事交通学院汽车工程系,天津300161;31湖南浦沅集团有限公司,湖南长沙410007)摘要:介绍了集装箱起重运输车电液操纵系统的组成和工作原理,并通过可编程序控制器控制电液操中图分类号:TH13717文献标识码:B文章编号:100024858(2004)04200462031引言集装箱起重运输车是一种机动、高效的集装箱装卸运载工具。它采用前后两套相同的装卸机构从车的侧面完成集装箱装卸作业,装卸机构如图1所示。目前,国内外同类产品在该装卸机构操纵过程中普遍存在两个问题。一是上壁液压缸和下臂液压缸通过相应的控制手柄分别控制,不能同时动作。不论控制上臂液压缸还是下臂液压缸,上起重臂端点A均作曲线运动。因此,在使集装箱的角件与车上的旋锁脱离或对位时,操作员不得不交替操作上臂液压缸和下臂图1集装箱起重运输车装卸机构图收稿日期:2003210222作者简介:詹隽青(1960—),男,湖南益阳人,教授,主要从事集装箱装卸运输装备的科研和教学工作。密封间隙、有限的电磁铁推力和较大的阀芯行程都会限制压力梯度的提高。如果快速切换阀采用插装阀结构,由于锥阀的密封性比滑阀好,加大锥阀上腔的控制压力和流量,即可加快锥阀芯的运动速度,从而有利于提高压力梯度(高压大流量测试尤其如此),如图2b所示。4结论插装阀单元应用在液压CAT系统,可简化系统结构,提高试验过程的自动化程度。它在液压CAT中的图2压力阀流量阶跃特性测试液压系统图至被试阀之间油液体积的大小都影响着压力梯度。从体积模数来看,管道和油液中的空气含量和管道变形也对压力梯度有较大影响。在结构已定的情况下,泵的容积效率、受控容腔大小、管道的弹性模数是一定的,为确保动态试验系统的压力梯度符合要求,关键在于选择阀口通断速度快的快速切换阀。如果快速切换阀采用滑阀结构,阀芯和阀套间的参考文献:GB/T8105—1987,压力控制阀试验方法S1GB/T15623—1995,电液伺服阀试验方法S12点A在空间的运动姿态不一致,并且位置误差超出一定范围时将危及作业安全。当出现这种现象时,操作人员不得不操作相应控制手柄来消除位置误差。针对以上问题,作者所在的课题组在开发新型集装箱起重运输车时采用了电液操纵系统,并通过可编程序控制器控制电液操纵系统,从而实现了上起重臂端点的直线运动和同步运动。2电液控制系统组成与工作原理211液压系统装卸机构的液压系统由油源部分和前、后装卸重臂运动平稳、安全。212电气系统装卸机构的电气控制系统主要由可编程序控制器、控制开关和手柄、角度传感器、输入输出模块和执行元件组成,如图3所示。图3电气控制系统框图(1)可编程序控制器可编程序控制器是电气控制系统的核心,内置了根据起重臂运动规律和电液比例阀的特性编写的相应计算程序,用于控制上起重臂端点的同步运动和直线运动。(2)控制开关和手柄设有直线-曲线运动转换开关、同步-异步转换开关、电源开关、紧急停车开关;设有2个手柄,可分别控制前、后起重臂的动作。选择同步动作状态时,只需1个手柄操作。(3)角度传感器在上、下起重臂的铰接点和下起重臂与车架的铰接点各安装有一个角度传感器,检测前后装卸机构的上、下起重臂之间相对转角和下起重臂与水平面之间相对转角。(4)输入输出模块输入输出模块中的模数转换模块采集来自手柄和角度传感器的模拟信号并转换成数字信号传给可编程序控制器;信号转换模块采集开关信号并转换成相应的数字信号传给可编程序控制器。数模转换模块将可编程序控制器计算所得脉宽调制信号转换成用于驱动电液比例阀的模拟信号。同时,电液比例阀的电流反馈信号经过模数转换模块反馈到可编程序控制器,构成闭环控制,提高电液比例阀的动作精度。(5)执行元件执行元件为控制前、后装卸机构的上、下起重臂液压缸的8个电液比例阀。3直线运动和同步运动的实现311A点坐标的计算在进行直线运动控制前,要根据检测到的下起重臂与水平面之间的夹角α和上、下起重臂...