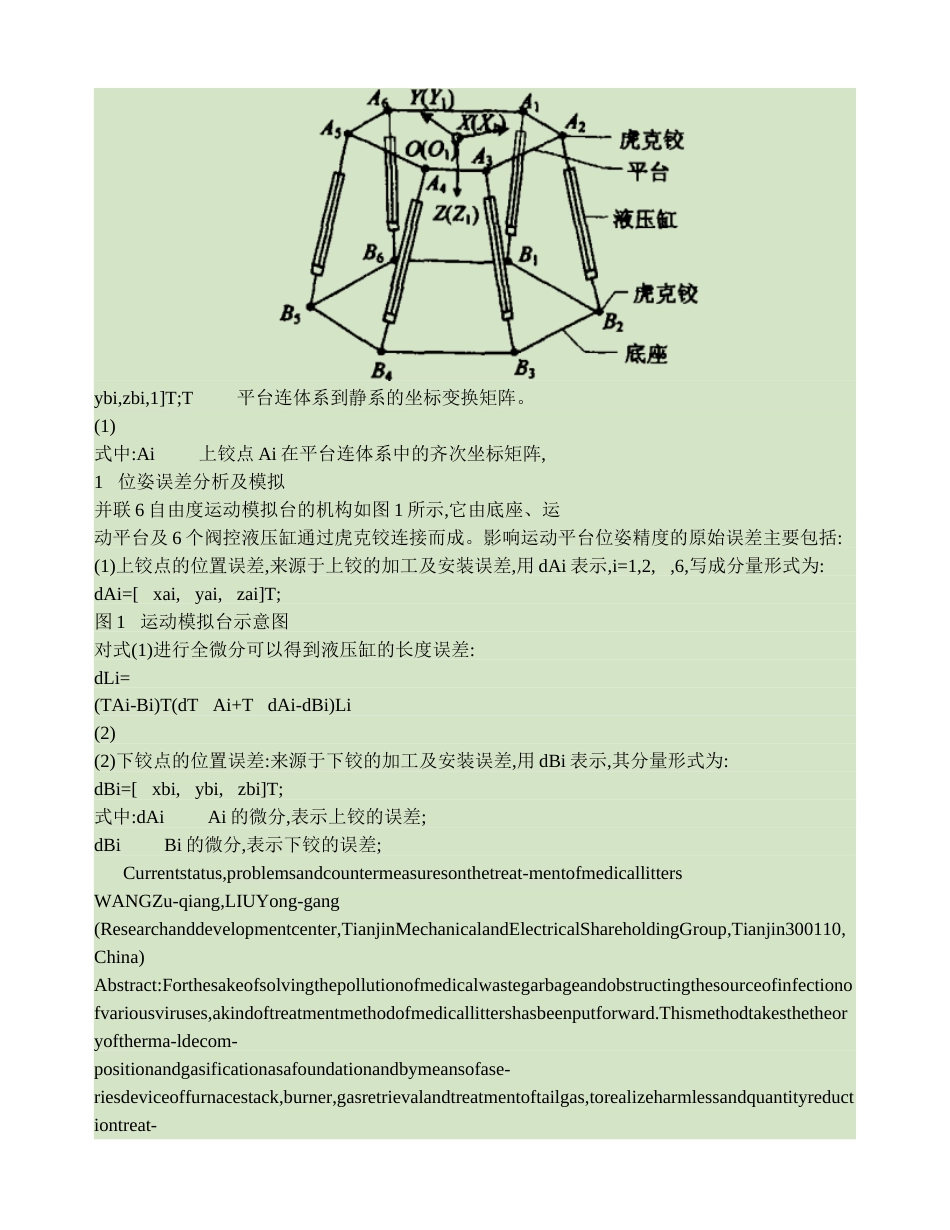
第23卷第10期2006年10月52机械设计JOURNALOFMACHINEDESIGNVol.23No.10Oct.2006并联6自由度运动模拟平台的误差分析赵强(东北林业大学交通运输工程学院,150040)*摘要:位姿误差是影响并联6自由度模拟平台性能的重要因素,文中采用矩阵微分法推导了原始误差与平台位姿误差之间的关系式,基于蒙特卡洛法对平台误差的概率分布进行研究,并分析了平台误差对各种原始误差的敏感度。分析表明6个缸长的误差敏感度最大,其次是上下铰点的Z向位置误差。以上研究结果对实际并联6自由度运动模拟台的设计具有参考作用。关键词:并联运动模拟台;误差;蒙特卡洛法;敏感度分析;中图分类号:U666.158文献标识码:A文章编号:1001-2354(2006)10-0052-03并联6自由度运动模拟平台在车辆、船舶和飞机等的运动模拟领域应用比较广泛,它采用的是Stewart平台机构[1],位姿精度是评价其性能好坏的一项重要指标,Wang等采用矩阵法分析了铰链加工及装配误差对6-UPS型平台位姿精度的影响,并提出了标定和补偿方法[2,3]。周跃发等给出了描述平台位姿误差和液压缸长度误差之间关系的雅可比矩阵,但未给出其它原始误差与平台位姿误差的关系式。文中首先分析产生平台位姿误差的42个原始误差,采用矩阵微分法推导出原始误差与平台位姿误差之间的关系式,进一步采用蒙特卡洛法进行误差模拟,并分析平台位姿误差对各个原始误差的敏感度,所得分析结果可以为并联模拟台的精度设计提供参考。[4](3)液压缸长度误差:来源于液压缸的加工误差及伺服跟踪误差,用dLi表示。以上共计42个原始误差量。为了描述模拟台的运动,如图1所示建立两个坐标系:固连于底座的静坐标系O-XYZ以及平台的连体坐标系O1-X1Y1Z1。则第i个液压缸的长度可以写为:Li=iiiii=1,2,,6[xai,yai,zai,1]T;Bi下铰点Bi在静系中的齐次坐标矩阵,[xbi,ybi,zbi,1]T;T平台连体系到静系的坐标变换矩阵。(1)式中:Ai上铰点Ai在平台连体系中的齐次坐标矩阵,1位姿误差分析及模拟并联6自由度运动模拟台的机构如图1所示,它由底座、运动平台及6个阀控液压缸通过虎克铰连接而成。影响运动平台位姿精度的原始误差主要包括:(1)上铰点的位置误差,来源于上铰的加工及安装误差,用dAi表示,i=1,2,,6,写成分量形式为:dAi=[xai,yai,zai]T;图1运动模拟台示意图对式(1)进行全微分可以得到液压缸的长度误差:dLi=(TAi-Bi)T(dTAi+TdAi-dBi)Li(2)(2)下铰点的位置误差:来源于下铰的加工及安装误差,用dBi表示,其分量形式为:dBi=[xbi,ybi,zbi]T;式中:dAiAi的微分,表示上铰的误差;dBiBi的微分,表示下铰的误差;Currentstatus,problemsandcountermeasuresonthetreat-mentofmedicallittersWANGZu-qiang,LIUYong-gang(Researchanddevelopmentcenter,TianjinMechanicalandElectricalShareholdingGroup,Tianjin300110,China)Abstract:Forthesakeofsolvingthepollutionofmedicalwastegarbageandobstructingthesourceofinfectionofvariousviruses,akindoftreatmentmethodofmedicallittershasbeenputforward.Thismethodtakesthetheoryoftherma-ldecom-positionandgasificationasafoundationandbymeansofase-riesdeviceoffurnacestack,burner,gasretrievalandtreatmentoftailgas,torealizeharmlessandquantityreductiontreat-ments.Thesetreatmentsnotonlysimplifiedthedeviceoftailgastreatmentbuttheamountofdischargeofdioxinscouldalsosatisfytherelevantstatestandard.Keywords:medicallitters;burning;therma-ldecompos-itionandgasification;controlofdioxinsFig4Tab1Ref4JixieSheji6494*收稿日期:2006-04-11;修订日期:2006-07-03:),男,,,,:,20余篇。2006年10月赵强:并联6自由度运动模拟平台的误差分析T0T0=00000T000000000-1530000-1dTT的微分,其是qi,dqi的非线性函数,其中q1,q2和q3为描述平台姿态的欧拉角,q4,q5和q6为平台的位置参数;dqiqi的微分,表示平台的位姿误差。1设si=(TAi-Bi)T将其代入式(2)得:LidLi=si(dTAi+TdAi-dBi)00T000000T0dA1dA2,dA=dA3dA4dA5dA6T,-1dB1dB2,dB=dB3dB4dB5dB,T0(3)...