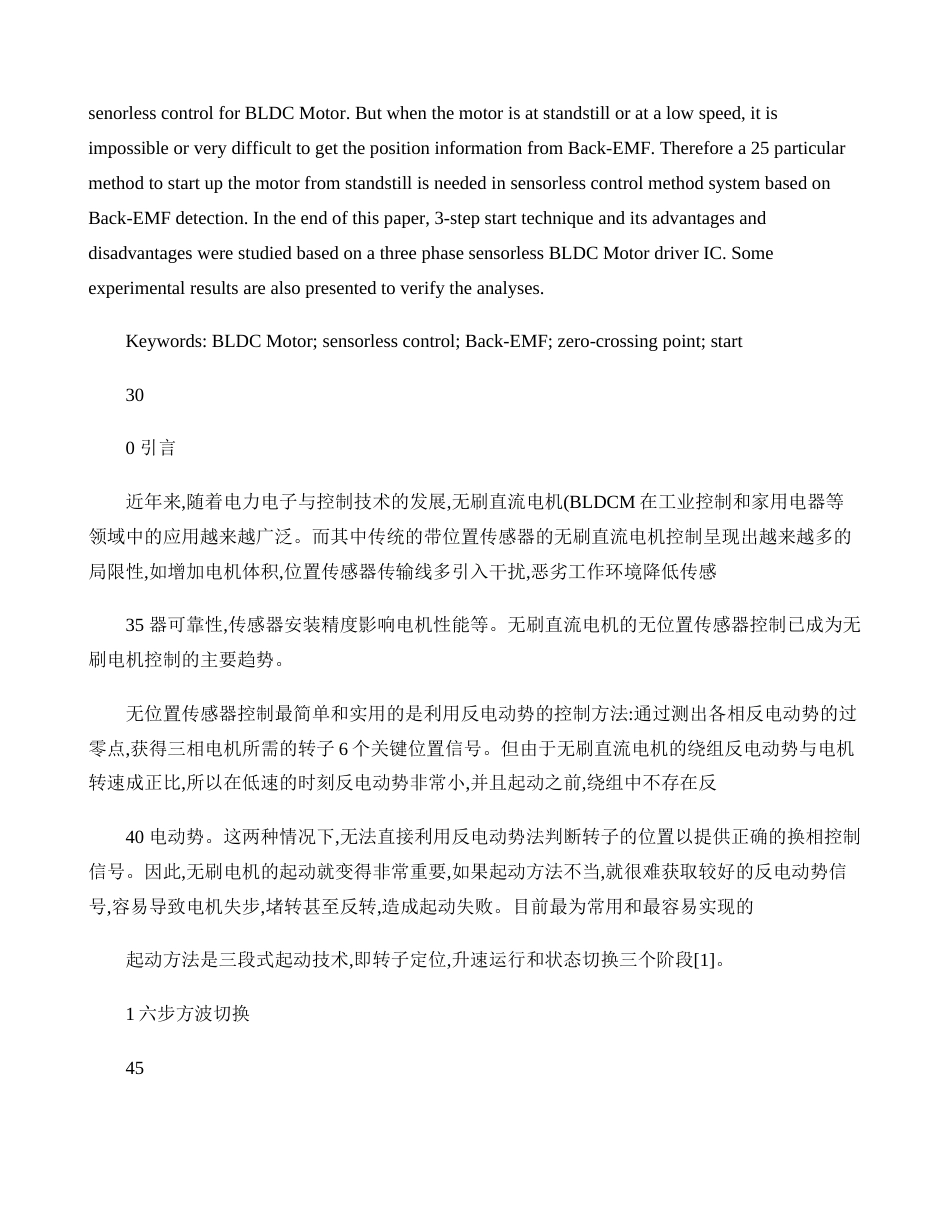
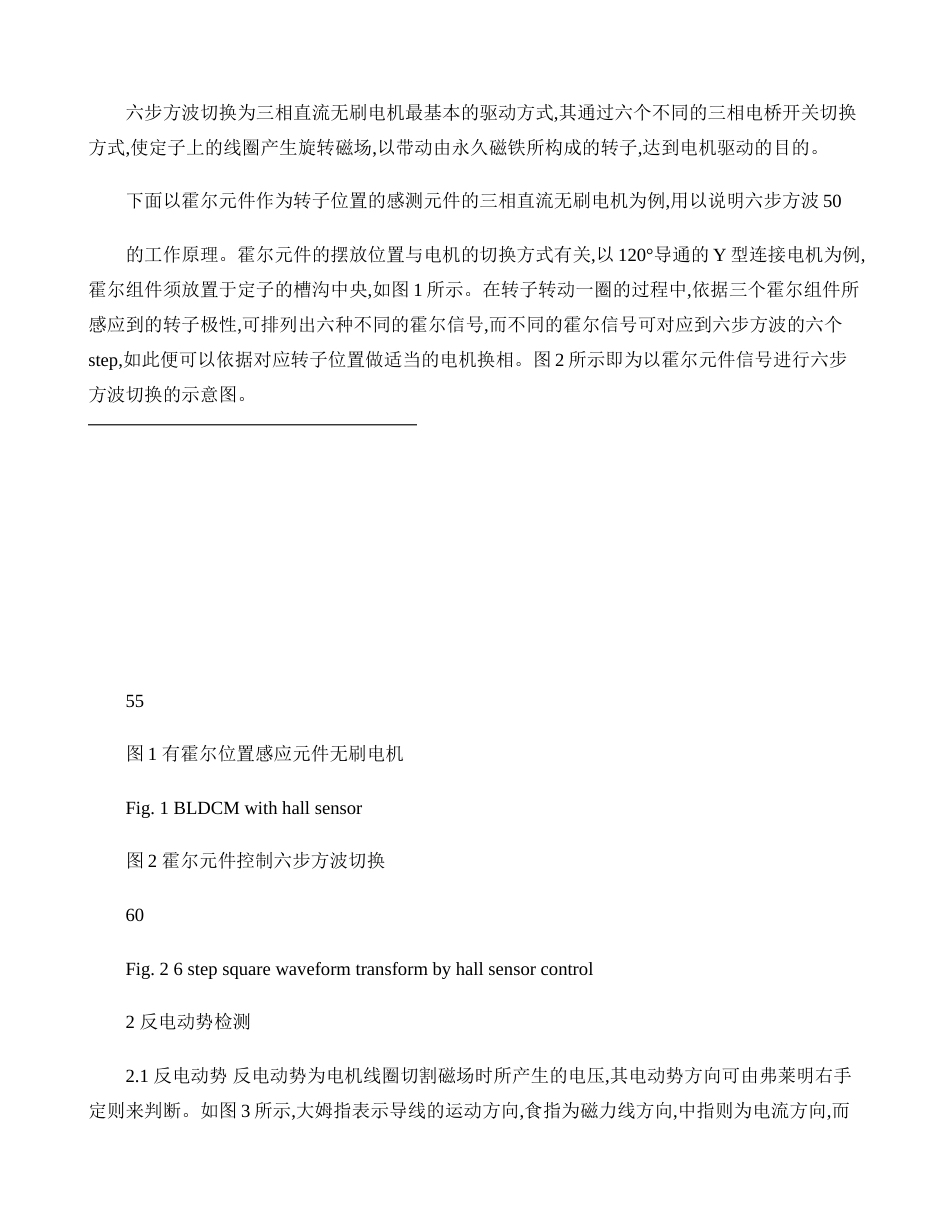
反电势法检测无刷直流电机转子位置技术研究彭业辉作者简介:彭业辉,(1986-,男,系统工程师,马达驱动&霍尔IC。E-mail:plane-1986@sohu.com(上海交通大学微电子学院,上海2002415摘要:无位置传感器无刷直流电机应用中,利用反电动势检测电机转子位置是目前最流行的应用方法。本文首先基于传统有位置传感器控制方法介绍了无刷直流电机的工作原理。然后对反电动势和零交越点检测电路做了详细的分析。根据这些分析,无位置传感器无刷直流电机控制技术更加容易理解。但无刷直流电机在转子静止或低速时反电动势为零或很小,无法用检测反电动势来判断转子位置,电机不能正常启动,基于反电动势的控制方法都需要特殊10的启动技术。本文最后基于一款三相无位置传感器无刷直流电机驱动IC研究了三段式启动技术并分析了它的优缺点,并用实验的方法加以验证。关键词:无刷直流电机;无位置传感器控制;反电动势;零交越点;起动中图分类号:TM38115StudyonTheMethodofBLDCMotorUsingBackEMFMonitorRotorDectectionPENGYehui(SchoolofMicroelectronics,ShanghaiJiaoTongUniversity,ShangHai200241Abstract:UsingBack-EMFmethodtomonitortherotordetectionisoneofthemostpopulartrend20inBLDCMotorapplication.Inthispaper,theprinciplehowBLDCMotorworkswasfirstlyintroducedbasedonthetraditionalsenorcontrolmethod.Andthen,Back-EMFandzero-crossingpointdetectingcircuitaredescribedandanalyzedindetail.Accordingthesestudies,itiseasytorealizesenorlesscontrolforBLDCMotor.Butwhenthemotorisatstandstilloratalowspeed,itisimpossibleorverydifficulttogetthepositioninformationfromBack-EMF.Thereforea25particularmethodtostartupthemotorfromstandstillisneededinsensorlesscontrolmethodsystembasedonBack-EMFdetection.Intheendofthispaper,3-stepstarttechniqueanditsadvantagesanddisadvantageswerestudiedbasedonathreephasesensorlessBLDCMotordriverIC.Someexperimentalresultsarealsopresentedtoverifytheanalyses.Keywords:BLDCMotor;sensorlesscontrol;Back-EMF;zero-crossingpoint;start300引言近年来,随着电力电子与控制技术的发展,无刷直流电机(BLDCM在工业控制和家用电器等领域中的应用越来越广泛。而其中传统的带位置传感器的无刷直流电机控制呈现出越来越多的局限性,如增加电机体积,位置传感器传输线多引入干扰,恶劣工作环境降低传感35器可靠性,传感器安装精度影响电机性能等。无刷直流电机的无位置传感器控制已成为无刷电机控制的主要趋势。无位置传感器控制最简单和实用的是利用反电动势的控制方法:通过测出各相反电动势的过零点,获得三相电机所需的转子6个关键位置信号。但由于无刷直流电机的绕组反电动势与电机转速成正比,所以在低速的时刻反电动势非常小,并且起动之前,绕组中不存在反40电动势。这两种情况下,无法直接利用反电动势法判断转子的位置以提供正确的换相控制信号。因此,无刷电机的起动就变得非常重要,如果起动方法不当,就很难获取较好的反电动势信号,容易导致电机失步,堵转甚至反转,造成起动失败。目前最为常用和最容易实现的起动方法是三段式起动技术,即转子定位,升速运行和状态切换三个阶段[1]。1六步方波切换45六步方波切换为三相直流无刷电机最基本的驱动方式,其通过六个不同的三相电桥开关切换方式,使定子上的线圈产生旋转磁场,以带动由永久磁铁所构成的转子,达到电机驱动的目的。下面以霍尔元件作为转子位置的感测元件的三相直流无刷电机为例,用以说明六步方波50的工作原理。霍尔元件的摆放位置与电机的切换方式有关,以120°导通的Y型连接电机为例,霍尔组件须放置于定子的槽沟中央,如图1所示。在转子转动一圈的过程中,依据三个霍尔组件所感应到的转子极性,可排列出六种不同的霍尔信号,而不同的霍尔信号可对应到六步方波的六个step,如此便可以依据对应转子位置做适当的电机换相。图2所示即为以霍尔元件信号进行六步方波切换的示意图。55图1有霍尔位置感应元件无刷电机Fig.1BLDCMwithhallsensor图2霍尔元件控制六步方波切换60Fig.26stepsquarewaveformtransformb...