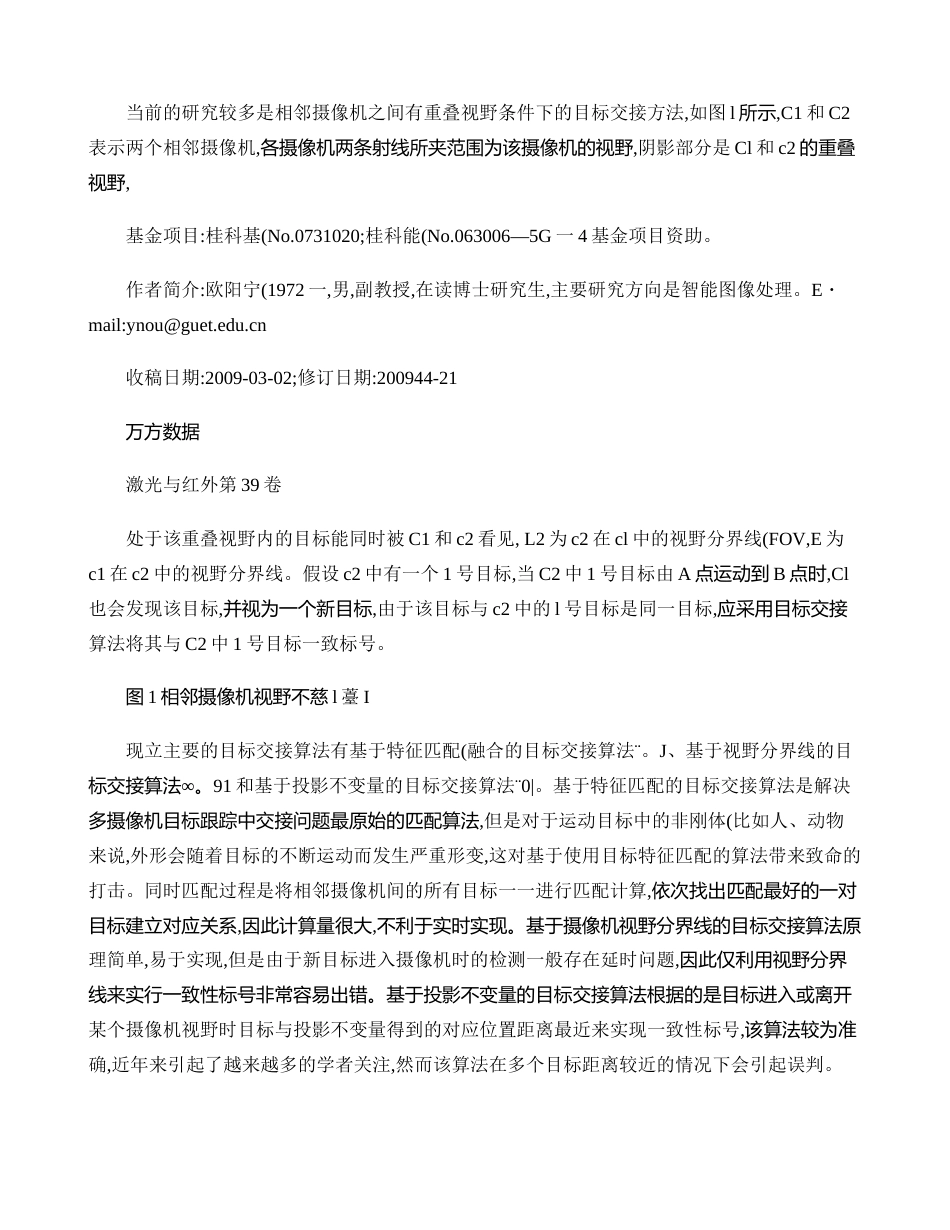
第39卷第9期2009年9月激光与红外LASER&INFRAREDV01.39,No.9September,2009文章编号:1001-5078(200909-0995-04・图像与信号处理・重叠视野域内多摄像机目标交换算法欧阳宁1,,刘钊1(1.电子科技大学电子工程学院,四川成都610054;2.桂林电子科技大学信息与通信学院,广西桂林541004摘要:多摄像机之间重叠视野区域内目标交接问题是实现多摄像机监控系统持续目标跟踪的关键,传统方法是在摄像机重叠视野区域内采用特征匹配方法或基于视野分界线的目标交接算法。但是特征匹配计算量较大,受摄像机参数设置因素影响较大,实用性不高。而基于视野分界线的目标交接算法由于新目标的检测存在延时,仅利用该方法来实现一致性标号容易出错。近年来,出现了利用投影不变量,计算目标在相邻摄像机中的投影位置来进行目标交接的方法,取得较好效果。但在多个目标相距较近的情况下,投影过程中产生的误差会造成目标对应错误。文中提出一种投影不变量和直方图匹配相结合的改进算法,实验表明能较好解决了上述问题。关键词:多摄像机;目标交接;投影不变量;直方图匹配中图分类号:唧51文献标识码:AMulti—cameraobjecthandoffalgorithminoverlappingfieldsofviewOUYANGNin91”,LIUZha01(1.SchoolofElectronicEnslneering,UniversityofElectronicScienceandTechnologyofChina,Chengdu610054,China;2.SchoolofInformationandCommunication,GuilinUniversityofElectronicTechnology,Guilin541004,ChinaAbstract:Theimplementationofobjecthandoffinoverlappingfieldsofviewisoneofthekeytechniquesofcontinualobjecttrackinginmulti—canleratrackingsystems.FeaturematchingmethodsandthealgorithmbasedonfieldofviewaI.eadoptedinconventionalsolutionstowardsthisproblem.However,FMisnotpracticalin印phcationbecauseitisnoteomputationallyefficientandtheresultsheavilydependontheparametersettingsofthecanlera¥.TheapproachesbasedonFOVsufferfromthedelayofthedetectionofnewlyapptmredobjects,causingtheresultsofconsistentlabe-lingalenotreliable.Recently,projectiveinvariantsmethodisusedtohandoffobject,butitwillmakemistakesinthecaseofmultipleobjectsappearclosely.Thepaperproposesanovelschemeforobjecthandoffbased011projectivein-variantsandhistogrammatching.Theexperimentalresultsshowthatourmethodcouldsolvetheproblemabove.Keywords:multi・camera;objecthandoff;projectiveinvariants;histogrammatchingl引言在多摄像机监控系统的运动目标跟踪中,主要的难点是如何在多个摄像机之间对相同的目标建立正确的对应关系,即多个摄像机所观测到相同目标要使用同一个标号来表示。这种建立对应关系的过程称为目标交接,也称为一致性标号过程。当前的研究较多是相邻摄像机之间有重叠视野条件下的目标交接方法,如图l所示,C1和C2表示两个相邻摄像机,各摄像机两条射线所夹范围为该摄像机的视野,阴影部分是Cl和c2的重叠视野,基金项目:桂科基(No.0731020;桂科能(No.063006—5G一4基金项目资助。作者简介:欧阳宁(1972一,男,副教授,在读博士研究生,主要研究方向是智能图像处理。E・mail:ynou@guet.edu.cn收稿日期:2009-03-02;修订日期:200944-21万方数据激光与红外第39卷处于该重叠视野内的目标能同时被C1和c2看见,L2为c2在cl中的视野分界线(FOV,E为c1在c2中的视野分界线。假设c2中有一个1号目标,当C2中1号目标由A点运动到B点时,Cl也会发现该目标,并视为一个新目标,由于该目标与c2中的l号目标是同一目标,应采用目标交接算法将其与C2中1号目标一致标号。图1相邻摄像机视野不慈l薹I现立主要的目标交接算法有基于特征匹配(融合的目标交接算法¨。J、基于视野分界线的目∞标交接算法。91和基于投影不变量的目标交接算法¨0|。基于特征匹配的目标交接算法是解决多摄像机目标跟踪中交接问题最原始的匹配算法,但是对于运动目标中的非刚体(比如人、动物来说,外形会随着目标的不断运动而发生严重形变,这对基于使用目标特征匹配的算法带来致命的打击。同时匹配过程是将相邻摄像机间的所有目标一一进行匹配计算,...