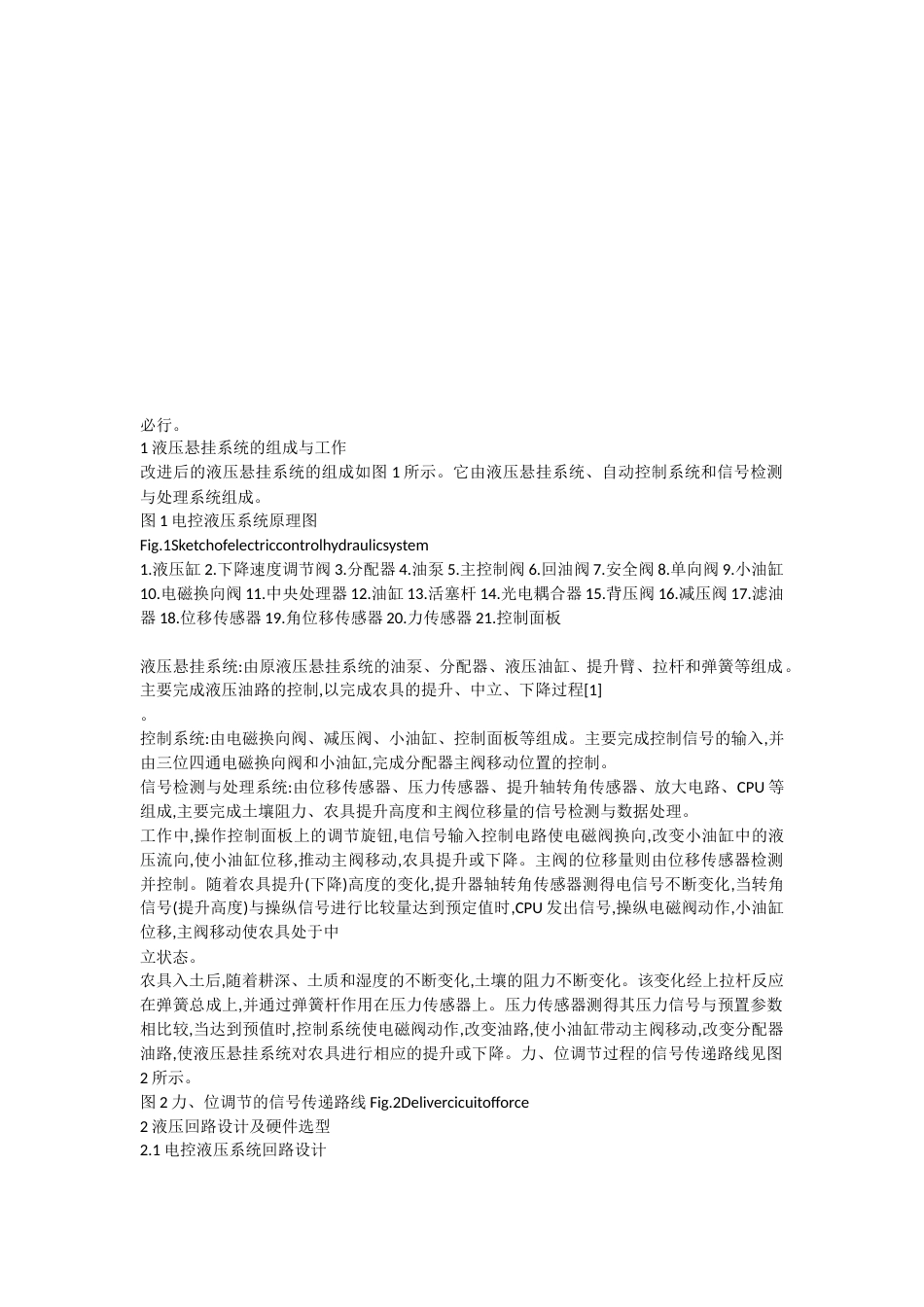
拖拉机液压悬挂机构自动控制系统王会明侯加林赵耀华李东民【摘要】在原拖拉机半分置式液压悬挂机构中改进设计了自动控制系统。分别阐述了自动控制系统的组成、工作原理、土壤阻力传感器、农具提升高度传感器、主控制阀位移传感器信号的测取与处理以及单片机控制的实现。控制系统试验表明,拖拉机液压悬挂系统的自动控制是有效的。关键词:液压悬挂机构换向阀传感器油缸自动控制:S219;O32.4文献标识码:AStudyonAutomaticControlSystemforHydraulicHitchEquipmentofTractorWangHuiming1Hou激alin1ZhaoYaohua2LiDongmin1(1.ShandongAgriculturalUniversity2.ShandongTractorManufactory)AbstractAsimplestructureofsemi-partitionhydraulichitchequipmentandconstitutingofautomaticcontrolsystemwasprovided.Thesignalofsoilresistancesensorandtheimplementliftheightsensorandthecontrol-valvesensorweremeasuredandmanaged.Thesystemwasunderthecon-troloftheSCM.Finally,theanalyticresultswereprovided,whichshowedthattherelationshipbetweentractionandthecultivatingdeepnesswasthelinear,andthehydraulichitchsystemoftractorwasautomaticcontrolled.Theresultsofexperimentshowedthatthedesigningplanisre-liable,theautomationofthesystembasicallyrealized,operationcouldbemadeeasily,produc-tioncosthasbeenreducedanditissimpleandconvenienttoinstall.KeywordsHydraulichitchequipment,Changevalve,Sensor,Cylinder,Automaticcontrol收稿日期:20050729王会明山东农业大学机械与电子工程学院教授,泰安市侯加林山东农业大学机械与电子工程学院教授赵耀华山东拖拉机厂工程师,泰安市李东民山东农业大学机械与电子工程学院硕士生引言现有的多数农用拖拉机的液压悬挂系统,其农具的提升和下降的控制部分是机械式的,由驾驶员通过操纵手柄和一套杆件机构以位移量的形式输入信号,输出量则是通过弹簧、凸轮和力、位调节杠杆机构转换成的位移量,从而实现操纵主控制阀对农具位置的调整。机械控制的液压悬挂系统采用杆件和弹性元件,结构比较复杂,弹性元件的迟滞、机械摩擦和杆件的胀缩会影响调节性能。进入21世纪后,拖拉机向大功率、低油耗、轻排放、智能化、密封和舒适性方向发展,机械式的控制系统在结构布置和性能方面已不适应现代农机发展的要求。将农业机械装备技术融合现代液压技术、传感器技术、微电子技术和单片机控制技术,可极大地提高液压悬挂系统操作的舒适性和简捷性,准确、快速地使用和调节液压悬挂系统,可提高生产率和作业质量。因此,对传统式液压悬挂系统的技术改进势在必行。1液压悬挂系统的组成与工作改进后的液压悬挂系统的组成如图1所示。它由液压悬挂系统、自动控制系统和信号检测与处理系统组成。图1电控液压系统原理图Fig.1Sketchofelectriccontrolhydraulicsystem1.液压缸2.下降速度调节阀3.分配器4.油泵5.主控制阀6.回油阀7.安全阀8.单向阀9.小油缸10.电磁换向阀11.中央处理器12.油缸13.活塞杆14.光电耦合器15.背压阀16.减压阀17.滤油器18.位移传感器19.角位移传感器20.力传感器21.控制面板液压悬挂系统:由原液压悬挂系统的油泵、分配器、液压油缸、提升臂、拉杆和弹簧等组成。主要完成液压油路的控制,以完成农具的提升、中立、下降过程[1]。控制系统:由电磁换向阀、减压阀、小油缸、控制面板等组成。主要完成控制信号的输入,并由三位四通电磁换向阀和小油缸,完成分配器主阀移动位置的控制。信号检测与处理系统:由位移传感器、压力传感器、提升轴转角传感器、放大电路、CPU等组成,主要完成土壤阻力、农具提升高度和主阀位移量的信号检测与数据处理。工作中,操作控制面板上的调节旋钮,电信号输入控制电路使电磁阀换向,改变小油缸中的液压流向,使小油缸位移,推动主阀移动,农具提升或下降。主阀的位移量则由位移传感器检测并控制。随着农具提升(下降)高度的变化,提升器轴转角传感器测得电信号不断变化,当转角信号(提升高度)与操纵信号进行比较量达到预定值时,CPU发出信号,操纵电磁阀动作,小油缸位移,主阀移动使农具处于中立状态。农具入土后,随着耕深、土质和湿...