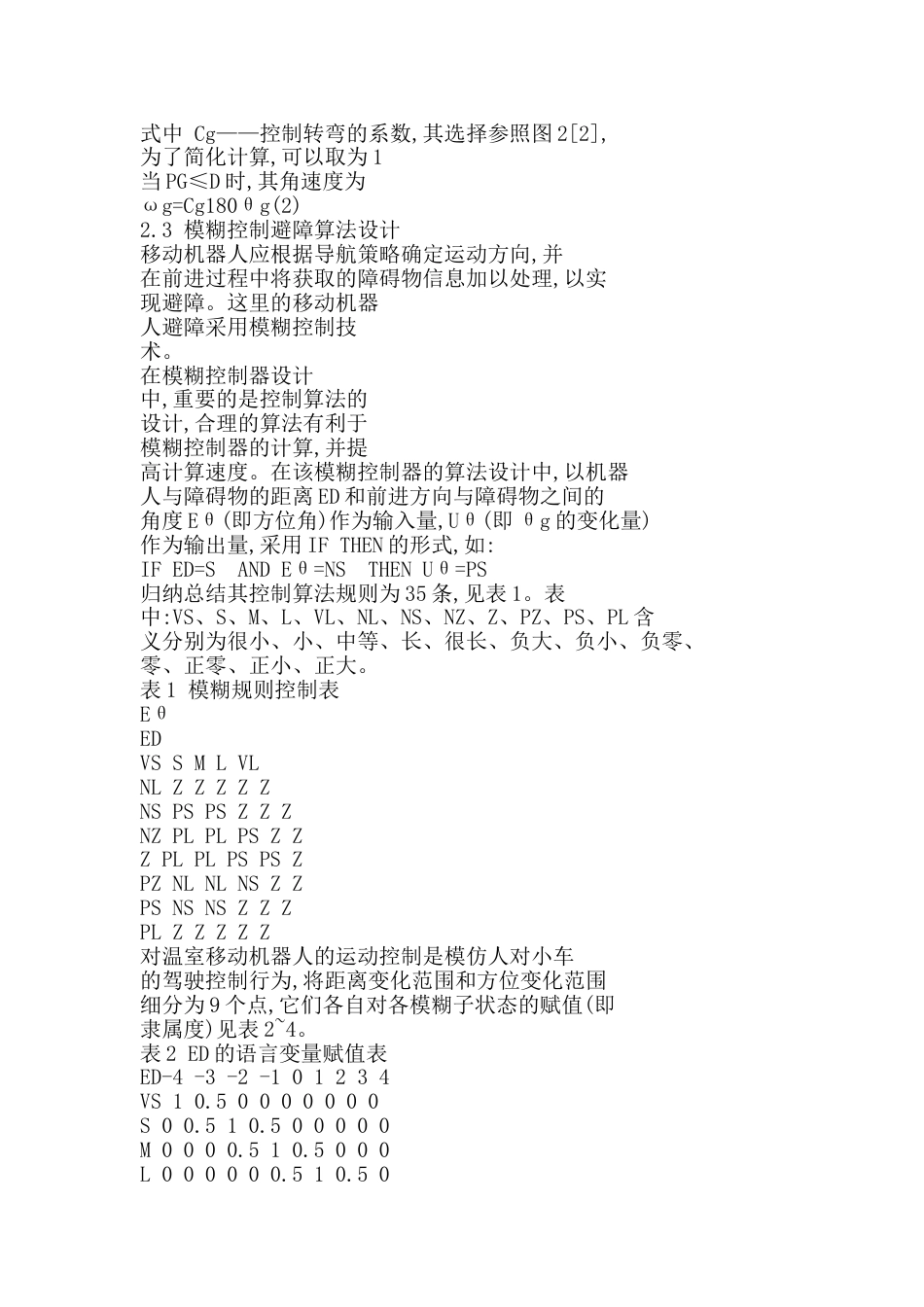
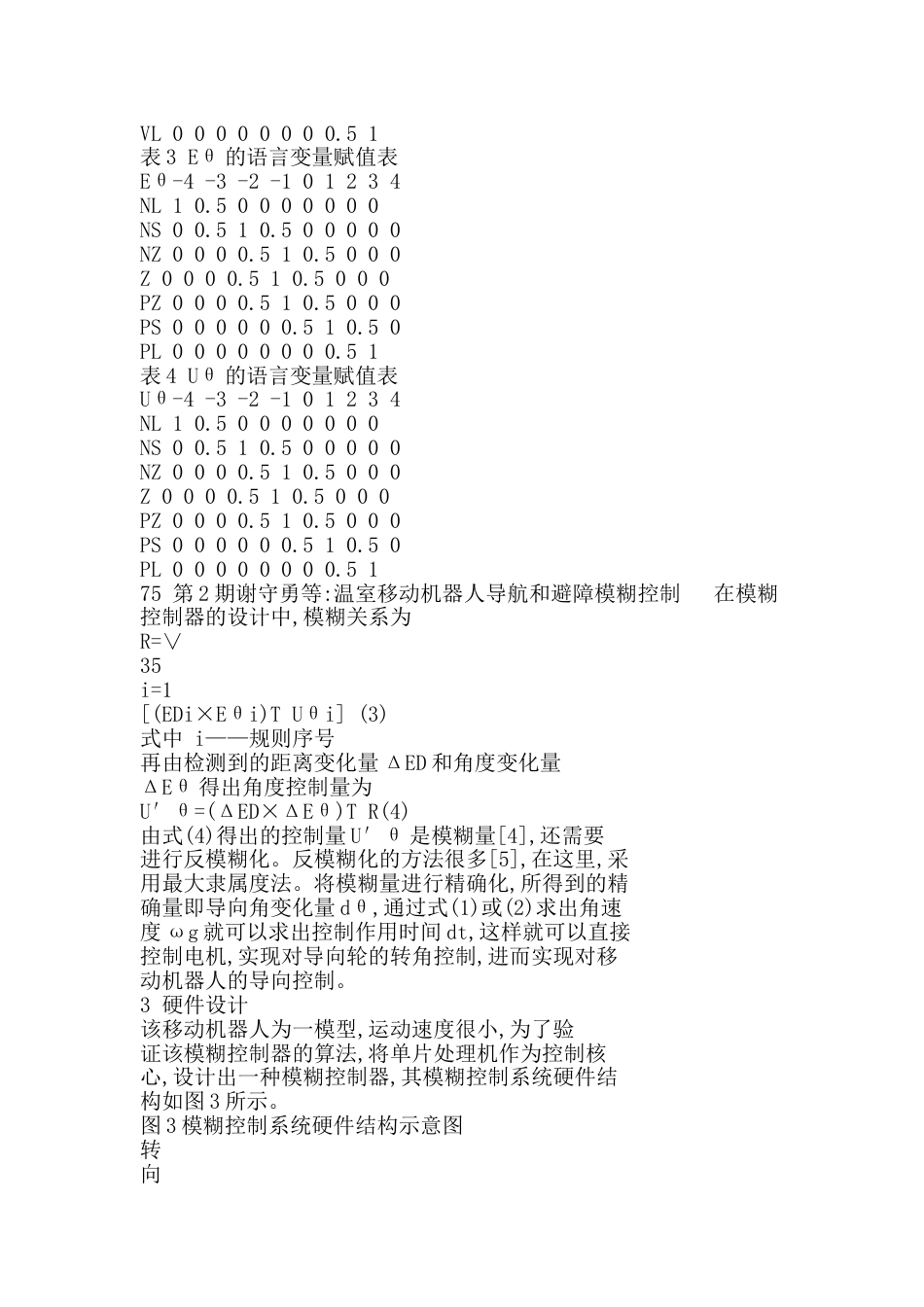
温室移动机器人导航和避障模糊控制2002年3月农业机械学报第33卷第2期温室移动机器人导航和避障模糊控制谢守勇鲍安红管在林杨国才【摘要】对适用于温室农业生产的移动机器人导航和避障进行了研究,采用模糊控制技术对温室移动机器人的控制算法进行研究。利用单片机作为控制核心,研制了一种模糊控制器,并在移动机器人模型上进行了实验。实验证明,该模糊控制算法在一定程度上能够满足温室移动机器人控制的需要。叙词:温室机器人视觉导航模糊控制中图分类号:TP249文献标识码:ANavigationofaMobileRobotinGreenhouseandItsObstacleAvoidancebyFuzzyControlXieShouyongBaoAnhongYangGuocai(SouthwestAgriculturalUniversity)GuanZailin(HuazhongUniversityofScienceandTechnology)AbstractThecontrollingarithmeticforamobilerobotingreenhousewasstudiedbyfuzzycontroltechniqueandafuzzycontroller,whichtookasinglechipasitscore,wasdeveloped.Thefuzzycontrollerwastestedforamobilerobotcontrolandtheresultsindicatedthatthecontrolarith-meticsatisfiedtherequirementsofamobilerobotingreenhouse.KeywordsGreenhouses,Robotvision,Navigation,Fuzzycontrol收稿日期:20010214谢守勇西南农业大学农业工程学院讲师,400716重庆市鲍安红西南农业大学农业工程学院博士管在林华中科技大学机械科学与工程学院博士副教授,430074武汉市杨国才西南农业大学信息学院教授引言单个温室使用面积小,一般的农业机械不能满足其使用要求,因此为了进一步挖掘温室生产潜力,提高经济效益,改善劳动条件和减轻劳动强度,开发温室移动机器人非常必要。由于农业生产环境与工业相比有其特殊性,农业机器人在生产过程中不但应具有定位、导航功能,还应能准确识别农作物的有无及其形状,以便实现定点均匀作业[1]。目前,国内对农业机器人的研究较少,因此,本文对温室农业生产机器人的导航和避障控制进行研究。1温室移动机器人的特点移动式机器人具有自主运动功能,即避障和导航功能。温室移动机器人活动场所内的障碍物主要是一些作物、温室骨架、管道和附属道路障碍等。温室移动机器人运动的目的主要是为了完成一定的工作任务,移动是完成生产任务的基础。因此,温室移动机器人应具备三大主要功能,即导航→避障→工作。温室移动式机器人的运动是通过前轮导向、后轮驱动来实现的。其运动的控制如果采用经典控制理论,则需要建立精确的数学模型。由于运动过程中的障碍物具有复杂性,其数学模型难以建立,采用模糊控制技术可以不必建立精确的数学模型,所以在该机器人的控制方式上采用模糊控制技术。2模糊控制器的设计2.1设计思想常规的模糊控制器是以某一变量的变化和变化率作为输入量而构成的二维模糊控制器。在该控制系统中,将传感器(3组红外线测距传感器)所检测到的障碍物距离变化量和方位角变化量作为输入量,通过模糊化、模糊推理、反模糊化得到一个角度变化量作为输出量,再转变成角速度和控制时间来实现对前轮方向控制电机的控制,以实现对移动机器人前进方向的控制。2.2导航策略为了实现机器人运动控制的自动性,需要对移动机器人的运动方向进行确定,根据检测到的障碍物信息自动找出其运动方向。图1为某温室移动机器人向目标G运动的示意图[2]。图1移动机器人向目标运动示意图在该图中,假设机器人的运动只有前进,其前进速度为定值。由物理学可知,在任意两个物体之间将产生吸引力[3],现假设目标G对机器人产生吸引力为Fa,该力很小,对机器人的运动具有引导作用。ωg为机器人前轮转向的角速度,θg为偏离目标的角度,θ为导向角,D为机器人宽度。图2ωg与θg的关系图当PG>D时,其角速度为ωg=CgPGD180θg(1)式中Cg——控制转弯的系数,其选择参照图2[2],为了简化计算,可以取为1当PG≤D时,其角速度为ωg=Cg180θg(2)2.3模糊控制避障算法设计移动机器人应根据导航策略确定运动方向,并在前进过程中将获取的障碍物信息加以处理,以实现避障。这里的移动机器人避障采用模糊控制技术。在模糊控制器设计中,重要的是控制算法的设计,合理的算法有利于模糊控制器的计算,并提高计算速度。在该模糊控制器的算法设计中,以机器人与障碍物的距离ED和前...