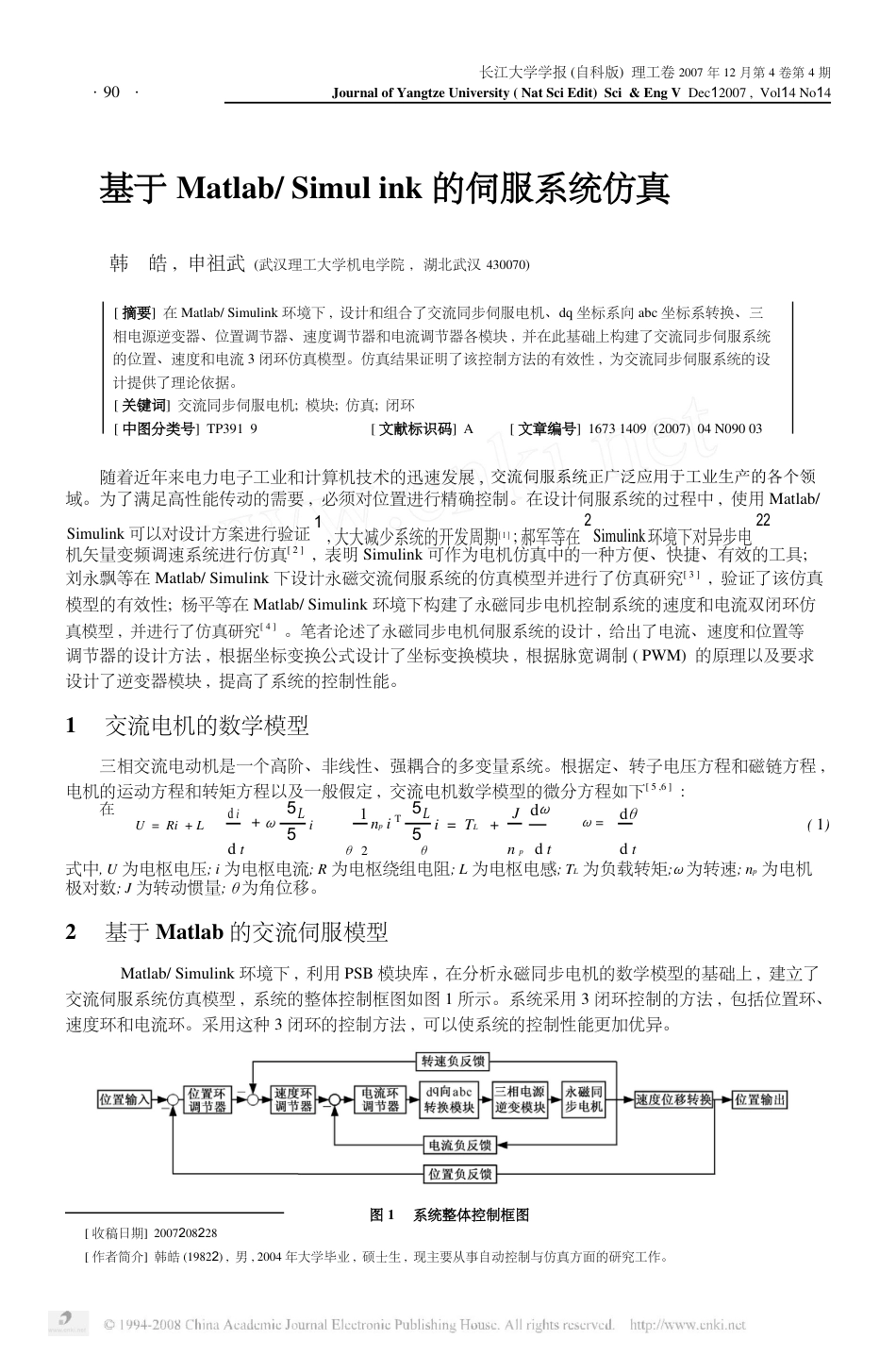
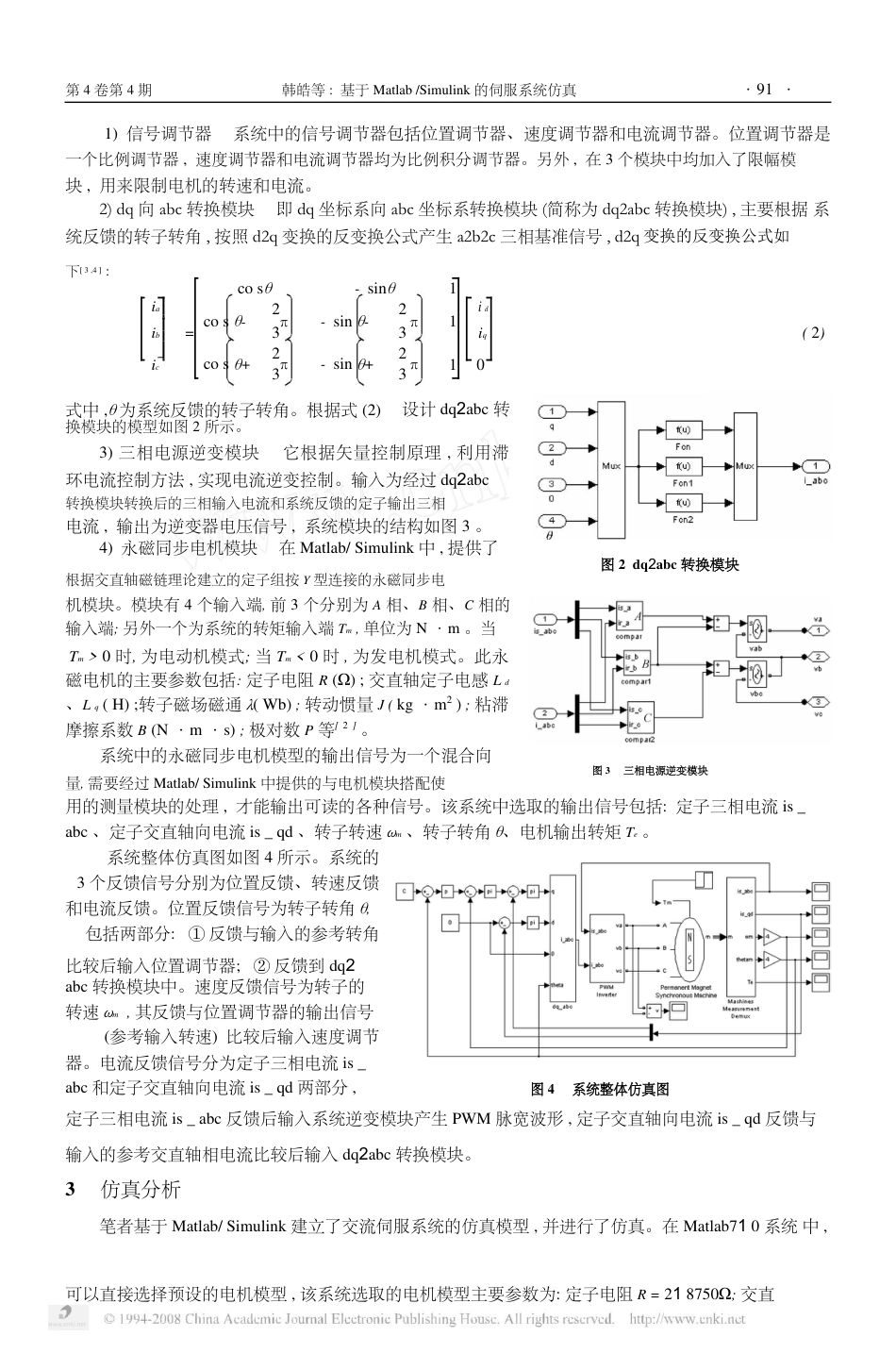
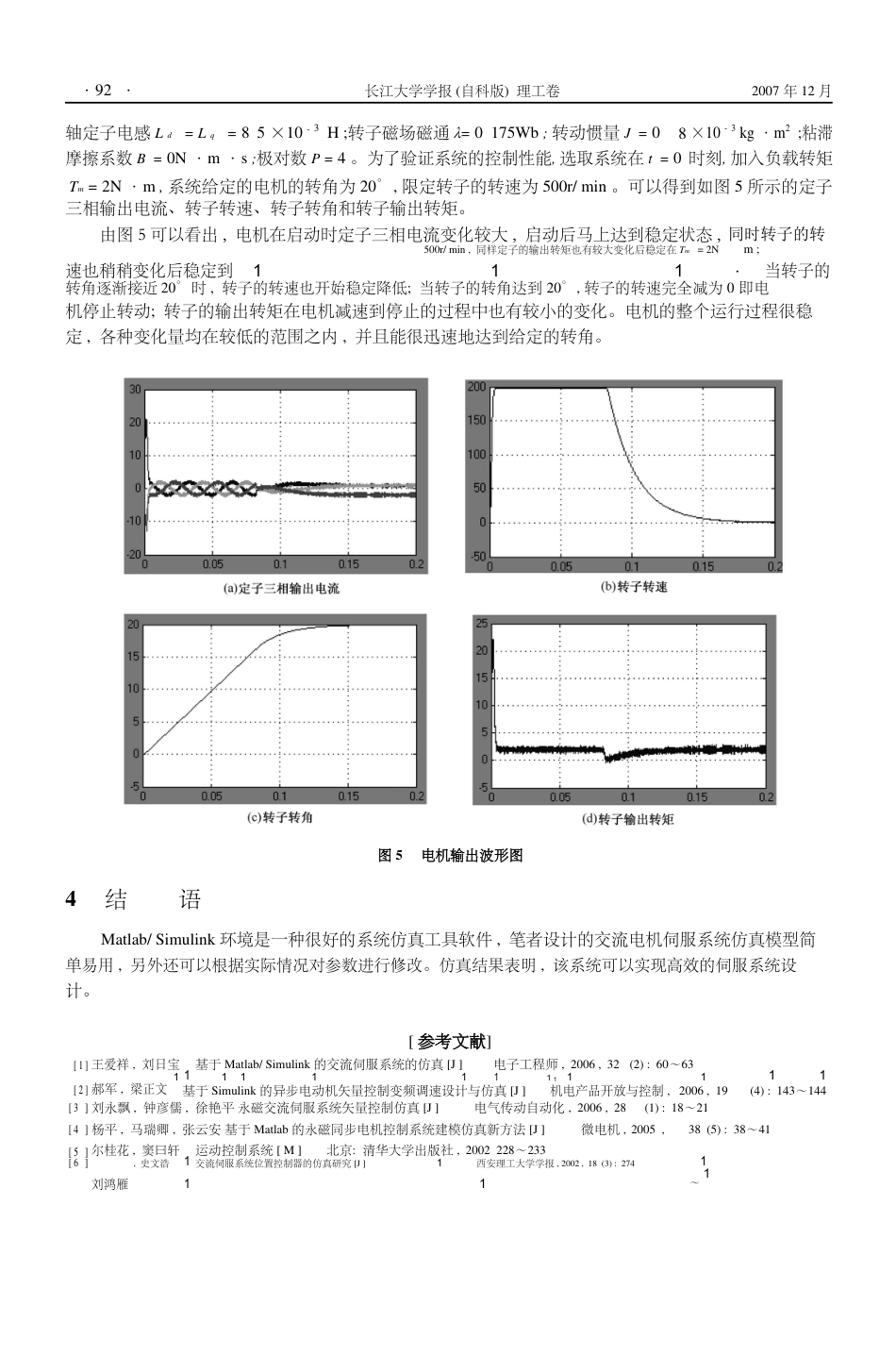
·90·长江大学学报(自科版)理工卷2007年12月第4卷第4期JournalofYangtzeUniversity(NatSciEdit)Sci&EngVDec12007,Vol14No14基于Matlab/Simulink的伺服系统仿真韩皓,申祖武(武汉理工大学机电学院,湖北武汉430070)[摘要]在Matlab/Simulink环境下,设计和组合了交流同步伺服电机、dq坐标系向abc坐标系转换、三相电源逆变器、位置调节器、速度调节器和电流调节器各模块,并在此基础上构建了交流同步伺服系统的位置、速度和电流3闭环仿真模型。仿真结果证明了该控制方法的有效性,为交流同步伺服系统的设计提供了理论依据。[关键词]交流同步伺服电机;模块;仿真;闭环[中图分类号]TP3919[文献标识码]A[文章编号]16731409(2007)04N09003随着近年来电力电子工业和计算机技术的迅速发展,交流伺服系统正广泛应用于工业生产的各个领域。为了满足高性能传动的需要,必须对位置进行精确控制。在设计伺服系统的过程中,使用Matlab/Simulink可以对设计方案进行验证1,大大减少系统的开发周期[1];郝军等在2Simulink环境下对异步电22机矢量变频调速系统进行仿真[2],表明Simulink可作为电机仿真中的一种方便、快捷、有效的工具;刘永飘等在Matlab/Simulink下设计永磁交流伺服系统的仿真模型并进行了仿真研究[3],验证了该仿真模型的有效性;杨平等在Matlab/Simulink环境下构建了永磁同步电机控制系统的速度和电流双闭环仿真模型,并进行了仿真研究[4]。笔者论述了永磁同步电机伺服系统的设计,给出了电流、速度和位置等调节器的设计方法,根据坐标变换公式设计了坐标变换模块,根据脉宽调制(PWM)的原理以及要求设计了逆变器模块,提高了系统的控制性能。1交流电机的数学模型三相交流电动机是一个高阶、非线性、强耦合的多变量系统。根据定、转子电压方程和磁链方程,电机的运动方程和转矩方程以及一般假定,交流电机数学模型的微分方程如下[5,6]:在di+ω5L1npiT5LJdωω=dθU=Ri+Lii=TL+(1)55dtnpdtdtθ2θ式中,U为电枢电压;i为电枢电流;R为电枢绕组电阻;L为电枢电感;TL为负载转矩;ω为转速;np为电机极对数;J为转动惯量;θ为角位移。2基于Matlab的交流伺服模型Matlab/Simulink环境下,利用PSB模块库,在分析永磁同步电机的数学模型的基础上,建立了交流伺服系统仿真模型,系统的整体控制框图如图1所示。系统采用3闭环控制的方法,包括位置环、速度环和电流环。采用这种3闭环的控制方法,可以使系统的控制性能更加优异。图1系统整体控制框图[收稿日期]2007208228[作者简介]韩皓(19822),男,2004年大学毕业,硕士生,现主要从事自动控制与仿真方面的研究工作。第4卷第4期韩皓等:基于Matlab/Simulink的伺服系统仿真·91·1)信号调节器系统中的信号调节器包括位置调节器、速度调节器和电流调节器。位置调节器是一个比例调节器,速度调节器和电流调节器均为比例积分调节器。另外,在3个模块中均加入了限幅模块,用来限制电机的转速和电流。2)dq向abc转换模块即dq坐标系向abc坐标系转换模块(简称为dq2abc转换模块),主要根据系统反馈的转子转角,按照d2q变换的反变换公式产生a2b2c三相基准信号,d2q变换的反变换公式如下[3,4]:cosθ-sinθ1iacosθ-2π-sinθ-2π1idib=33iq(2)iccosθ+2π-sinθ+2π1033式中,θ为系统反馈的转子转角。根据式(2)设计dq2abc转换模块的模型如图2所示。3)三相电源逆变模块它根据矢量控制原理,利用滞环电流控制方法,实现电流逆变控制。输入为经过dq2abc转换模块转换后的三相输入电流和系统反馈的定子输出三相电流,输出为逆变器电压信号,系统模块的结构如图3。4)永磁同步电机模块在Matlab/Simulink中,提供了图2dq2abc转换模块根据交直轴磁链理论建立的定子组按Y型连接的永磁同步电机模块。模块有4个输入端,前3个分别为A相、B相、C相的输入端;另外一个为系统的转矩输入端Tm,单位为N·m。当Tm>0时,为电动机模式;当Tm<0时,为发电机模式。此永磁电机的主要参数包括:定子电阻R(Ω);交直轴定子电感Ld、Lq(H);转子磁场磁通λ(Wb);转动惯量J(kg·m2);粘滞摩擦系数B(N·m·s);极对数P等[2]。系统中的永磁同步电机模型的输出信号为一个混合向图3三相电源逆变模块量,需要经过Matlab/Simulink中提供的与电机模块搭配使用的测量...