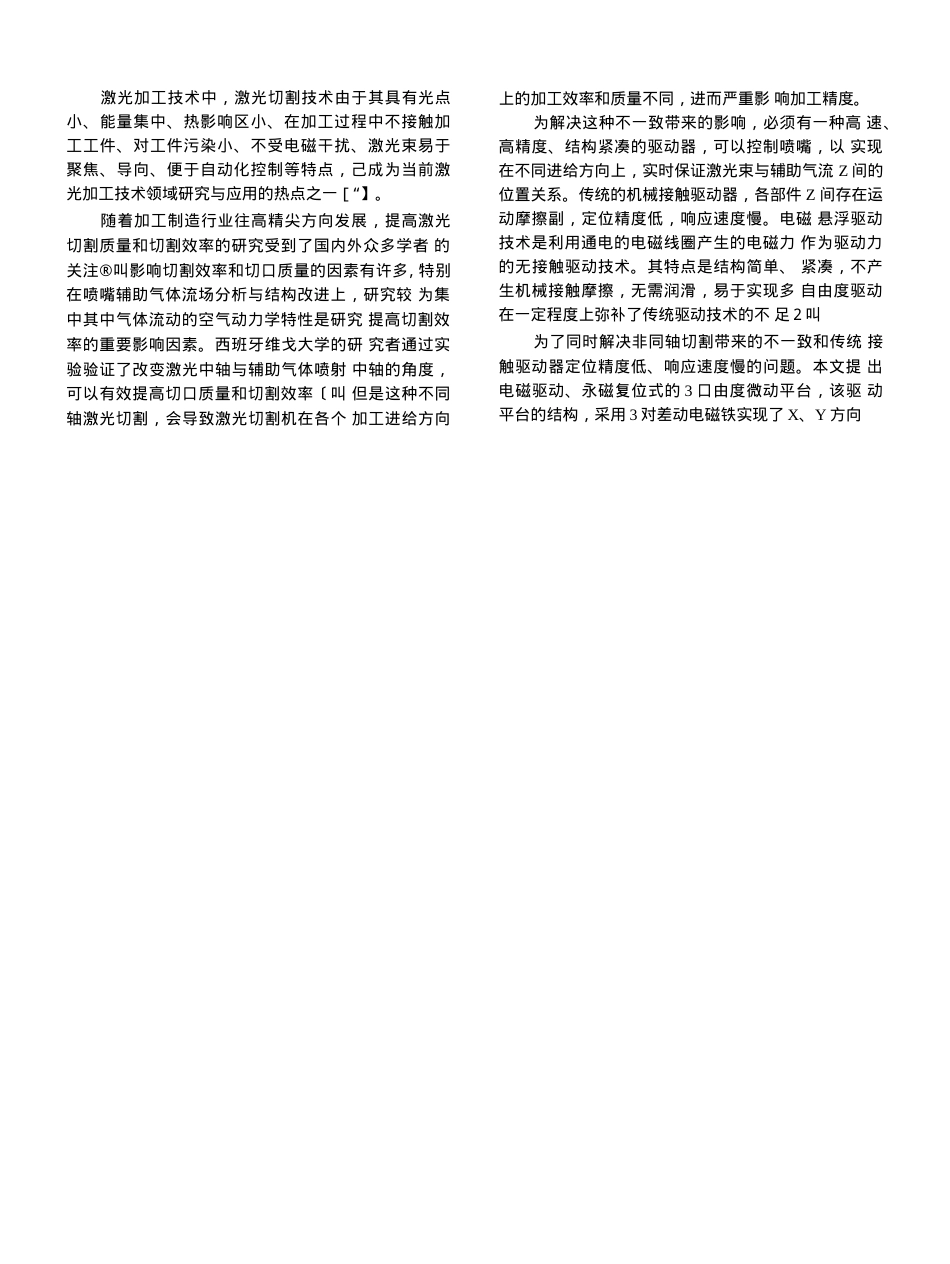
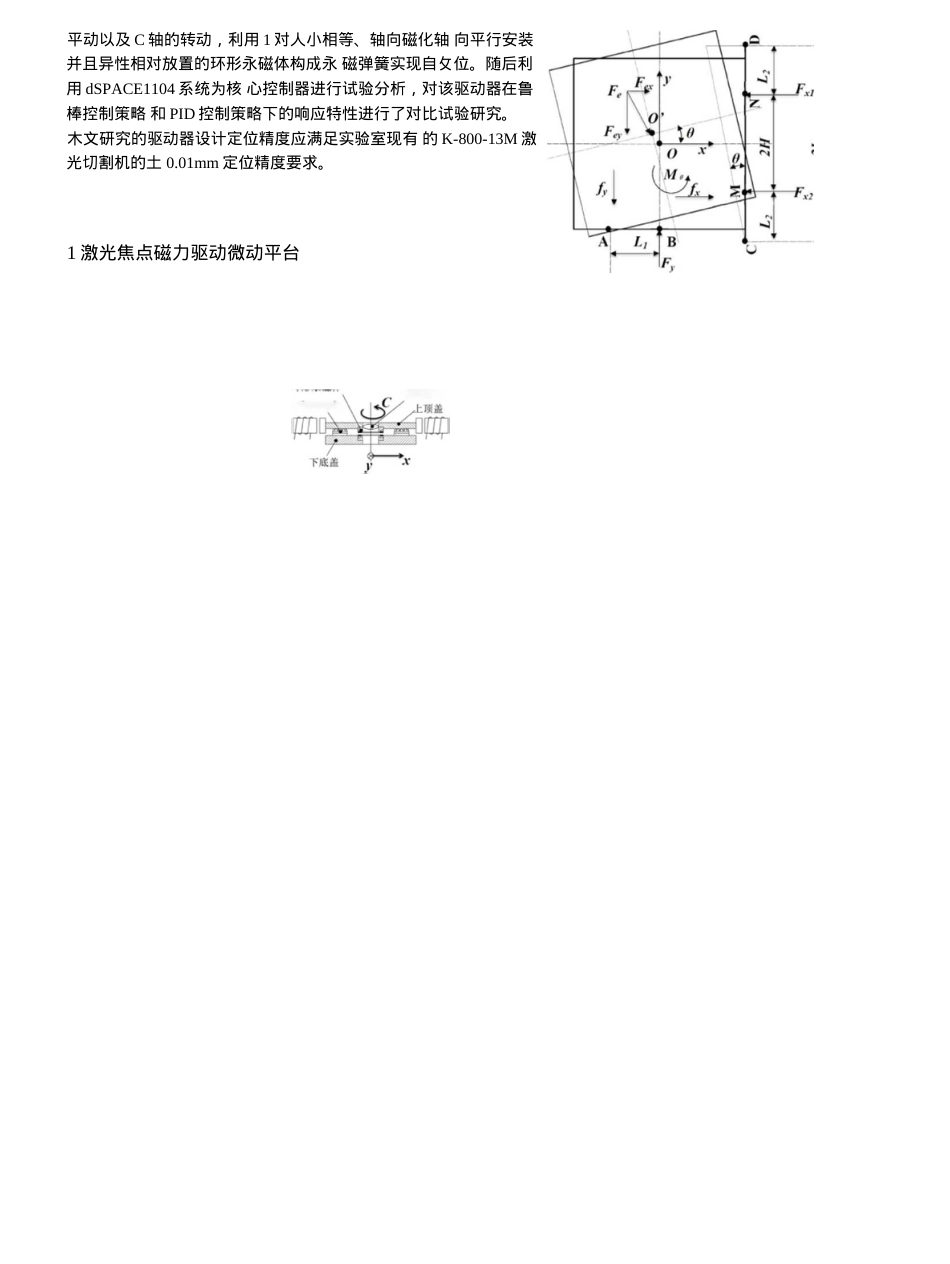
激光焦点控制磁力驱动的控制特性实验对比分析1佟玲I,吴利平I,金嘉琦I,孙凤I,张晓友▽(1.沈阳工业大学机械工程学院,辽宁沈阳110870;2.日本工业大学,日本琦玉345-0826)摘要:为了满足激光焦点控制系统的位置和速度响应耍求,该文设计了一种轴向放置、轴向磁化的坏形永磁体自复位的3自由度激光焦点磁力驱动微动平台。根据该微动平台的结构进行力学分析和动力学方程的建立,在此基础上进行微动平台的PID控制实验和鲁棒控制实验。通过两种不同的控制策略的对比分析,结果表明,两种控制策略都能实现微动平台的稳定驱动,但是在PID控制策略卞,响应速度更好,在鲁棒控制策略卞,抗干扰能力更好。关键词:电磁驱动;鲁棒控制;PID控制;对比实验;差动控制中图分类号:TH-39文献标志码:A文章编号:TheExperimentalComparativeAnalysisofControlCharacteristicsofLaserFocusControlMagneticForceDriveTONGLing1,WULiping1,JINJiaqi1,SUNFeng1,ZHANGXiaoyouU2(1.SchoolofMechanicalEngineering,ShenyangUniversityofTechnology,Shenyang110870,China;2.NipponInstituteofTechnology,Saitama345-0826,Japan)Abstract:Inordertosatisfytherequirementsofpositionandvelocityresponseofthelaserfocuscontrolsystem,athrcc-dcgrcc-of-frccdonilaserfocusmagneticallydrivenmicro-motionplatformisdcsignedinthispapc匚Accordingtothestructureofthefreestyleplatform,themechanicalanalysisandtheestablishmentofthekineticequationarecarriedout.Onthisbasis,thePIDcontrolexperimentandtherobustcontrolexperimentofthefrettingplatformarecarriedout.Theresultsshowthatthetwocontrolstrategiescanachievethestabledrivingofthemicro-motionplatform,butunderthePIDcontrolstrategy,theresponsespeedisbetter,undertherobustcontrolstrategy,theanti-jammingabilitybetter.Keywords:electromagneticdrive;robustcontrol;PIDcontrol;comparativeexperiment;differentialcontrol1收稿日期:2017-XX-XX基金项目:国家自然科学基金资助项目(51105257,51310105025)作者简介:佟玲(1980—),女,辽宁沈阳人,博士研究生,E-mail:tonglingsy@163.com;孙凤(通信作者),男,副教授,博士,博士生副导师,E-mail:sunfeng@sut.edu.cn激光加工技术中,激光切割技术由于其具有光点小、能量集中、热影响区小、在加工过程中不接触加工工件、对工件污染小、不受电磁干扰、激光束易于聚焦、导向、便于自动化控制等特点,己成为当前激光加工技术领域研究与应用的热点之一[“】。随着加工制造行业往高精尖方向发展,提高激光切割质量和切割效率的研究受到了国内外众多学者的关注®叫影响切割效率和切口质量的因素有许多,特别在喷嘴辅助气体流场分析与结构改进上,研究较为集中其中气体流动的空气动力学特性是研究提高切割效率的重要影响因素。西班牙维戈大学的研究者通过实验验证了改变激光中轴与辅助气体喷射中轴的角度,可以有效提高切口质量和切割效率〔叫但是这种不同轴激光切割,会导致激光切割机在各个加工进给方向上的加工效率和质量不同,进而严重影响加工精度。为解决这种不一致带来的影响,必须有一种高速、高精度、结构紧凑的驱动器,可以控制喷嘴,以实现在不同进给方向上,实时保证激光束与辅助气流Z间的位置关系。传统的机械接触驱动器,各部件Z间存在运动摩擦副,定位精度低,响应速度慢。电磁悬浮驱动技术是利用通电的电磁线圈产生的电磁力作为驱动力的无接触驱动技术。其特点是结构简单、紧凑,不产生机械接触摩擦,无需润滑,易于实现多自由度驱动在一定程度上弥补了传统驱动技术的不足2叫为了同时解决非同轴切割带来的不一致和传统接触驱动器定位精度低、响应速度慢的问题。本文提出电磁驱动、永磁复位式的3口由度微动平台,该驱动平台的结构,采用3对差动电磁铁实现了X、Y方向平动以及C轴的转动,利用1对人小相等、轴向磁化轴向平行安装并且异性相对放置的环形永磁体构成永磁弹簧实现自攵位。随后利用dSPACE1104系统为核心控制器进行试验分析,对该驱动器在鲁棒控制策略和PID控制策...