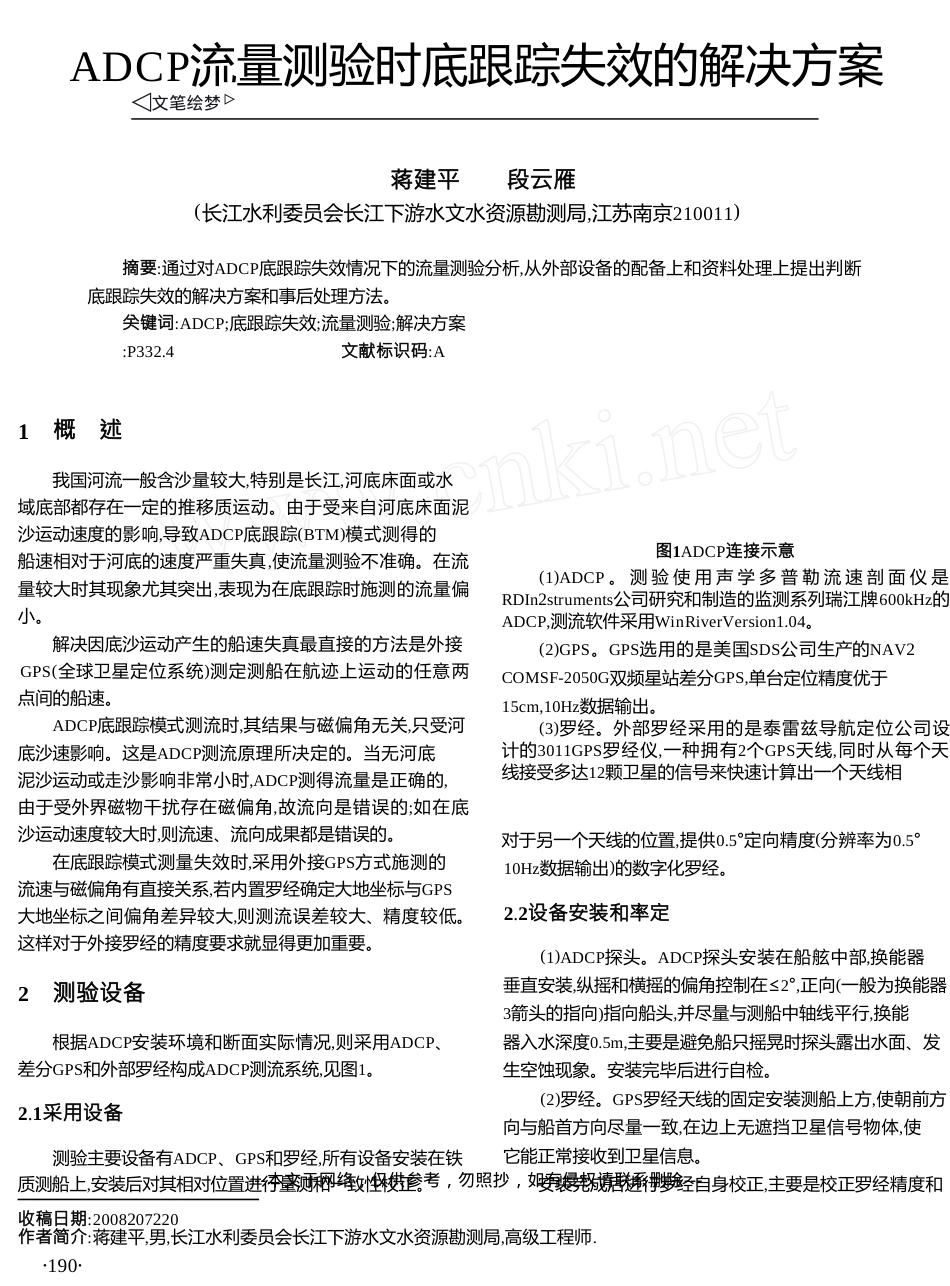
ADCP流量测验时底跟踪失效的解决方案蒋建平段云雁(长江水利委员会长江下游水文水资源勘测局,江苏南京210011)摘要:通过对ADCP底跟踪失效情况下的流量测验分析,从外部设备的配备上和资料处理上提出判断底跟踪失效的解决方案和事后处理方法。关键词:ADCP;底跟踪失效;流量测验;解决方案:P332.4文献标识码:A概述1我国河流一般含沙量较大,特别是长江,河底床面或水域底部都存在一定的推移质运动。由于受来自河底床面泥沙运动速度的影响,导致ADCP底跟踪(BTM)模式测得的船速相对于河底的速度严重失真,使流量测验不准确。在流量较大时其现象尤其突出,表现为在底跟踪时施测的流量偏小。解决因底沙运动产生的船速失真最直接的方法是外接GPS(全球卫星定位系统)测定测船在航迹上运动的任意两点间的船速。ADCP底跟踪模式测流时,其结果与磁偏角无关,只受河底沙速影响。这是ADCP测流原理所决定的。当无河底泥沙运动或走沙影响非常小时,ADCP测得流量是正确的,由于受外界磁物干扰存在磁偏角,故流向是错误的;如在底沙运动速度较大时,则流速、流向成果都是错误的。在底跟踪模式测量失效时,采用外接GPS方式施测的流速与磁偏角有直接关系,若内置罗经确定大地坐标与GPS大地坐标之间偏角差异较大,则测流误差较大、精度较低。这样对于外接罗经的精度要求就显得更加重要。图1ADCP连接示意(1)ADCP。测验使用声学多普勒流速剖面仪是RDIn2struments公司研究和制造的监测系列瑞江牌600kHz的ADCP,测流软件采用WinRiverVersion1.04。(2)GPS。GPS选用的是美国SDS公司生产的NAV2COMSF-2050G双频星站差分GPS,单台定位精度优于15cm,10Hz数据输出。(3)罗经。外部罗经采用的是泰雷兹导航定位公司设计的3011GPS罗经仪,一种拥有2个GPS天线,同时从每个天线接受多达12颗卫星的信号来快速计算出一个天线相对于另一个天线的位置,提供0.5°定向精度(分辨率为0.5°10Hz数据输出)的数字化罗经。2.2设备安装和率定(1)ADCP探头。ADCP探头安装在船舷中部,换能器垂直安装,纵摇和横摇的偏角控制在≤2°,正向(一般为换能器3箭头的指向)指向船头,并尽量与测船中轴线平行,换能器入水深度0.5m,主要是避免船只摇晃时探头露出水面、发生空蚀现象。安装完毕后进行自检。(2)罗经。GPS罗经天线的固定安装测船上方,使朝前方向与船首方向尽量一致,在边上无遮挡卫星信号物体,使它能正常接收到卫星信息。安装完成后进行罗经自身校正,主要是校正罗经精度和测验设备2根据ADCP安装环境和断面实际情况,则采用ADCP、差分GPS和外部罗经构成ADCP测流系统,见图1。2.1采用设备测验主要设备有ADCP、GPS和罗经,所有设备安装在铁质测船上,安装后对其相对位置进行量测和一致性校正。收稿日期:2008207220作者简介:蒋建平,男,长江水利委员会长江下游水文水资源勘测局,高级工程师.·190·---本文于网络,仅供参考,勿照抄,如有侵权请联系删除---个测回(往返各2次),施测时间近38min,任一次BTM和GGA模式下流量与平均值的相对误差都小于5%(最大为-1.75%),满足规范精度要求,见表1。安装偏差。GPS罗经校准可由人工校准和自动校准计算两种方法完成。值得一提的是罗经方向安装方向与ADCP3号探头方向的一致性一定要做,否则直接影响到GGA模式下流量的精度。(3)GPS。GPS天线尽可能安装在声学多普勒流速仪探头上方,并将数据刷新率设置成最大。如安装时GPS天线偏离太远,在施测中测船在转弯时测得船速是错误的。3.3成果的选用表1中,底跟踪模式下施测的流量为34955~35360m3/s,平均流量35139m3/s,而GGA模式时流量为42656~43906m3/s,平均流量43409m3/s,两种模式误差8270m3/s,BTM模式下流量比GGA模式偏小19.1%。各次施测3底跟踪失效解决方案流量BTM和GGA模式的断面流速分布图分别见图2~5。从断面图可以看出,在距左岸150~650m范围内,ADCP施测是底跟踪失效,导致该范围内流速明显偏小,但在GGA模式下流量得到了改正。在选用断面流量时,首先需要断面上任一次BTM和GGA模式下流量与平均值的相对误差不大于5%,若BTM和GGA模式下流量存在不同,说明存在着3.1方法在采用ADCP流量测验时,对于配备GPS和外部罗经等传感器主要因底跟踪失效流量偏小起到改正的作用。在底跟踪失效无法施测...