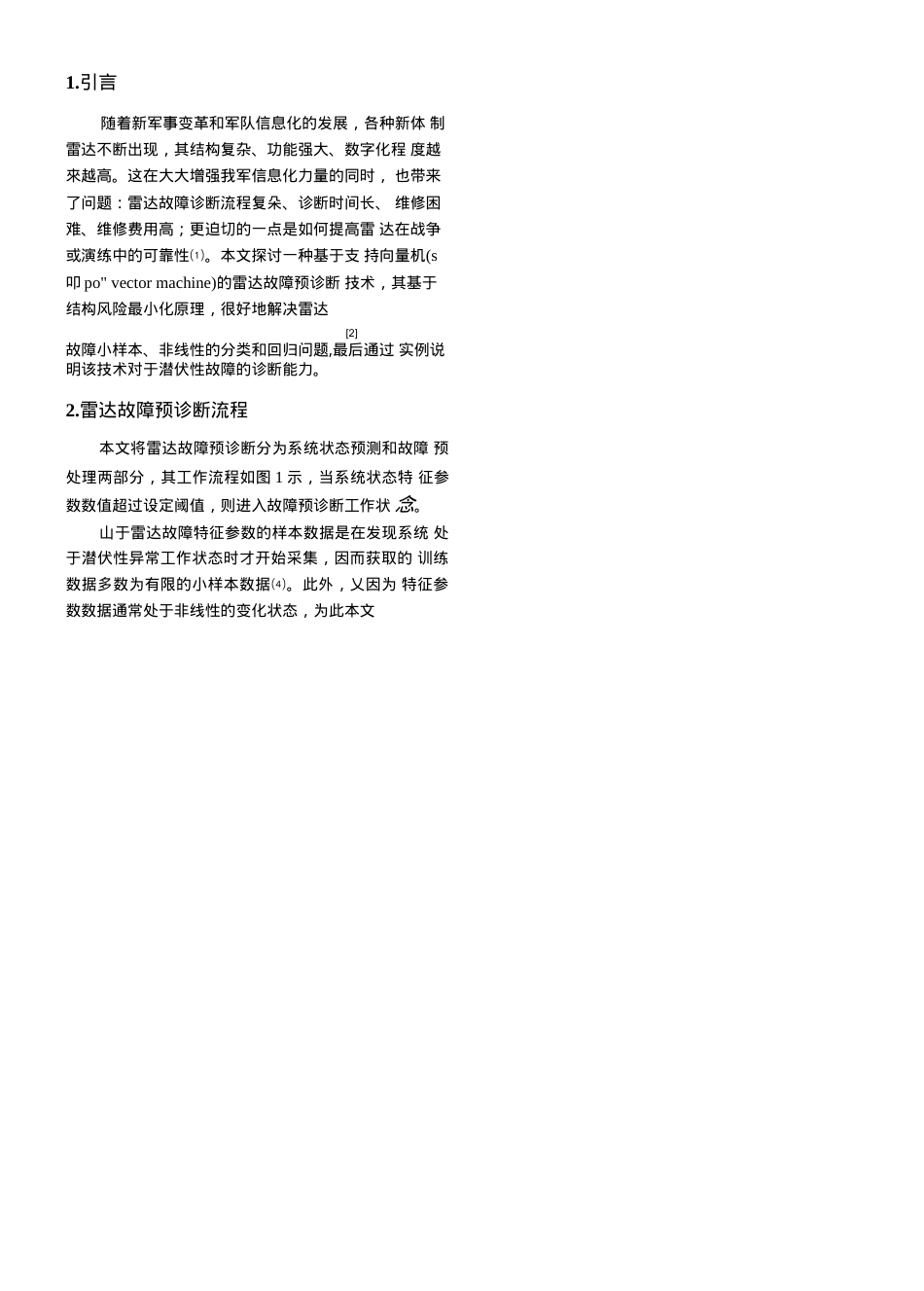
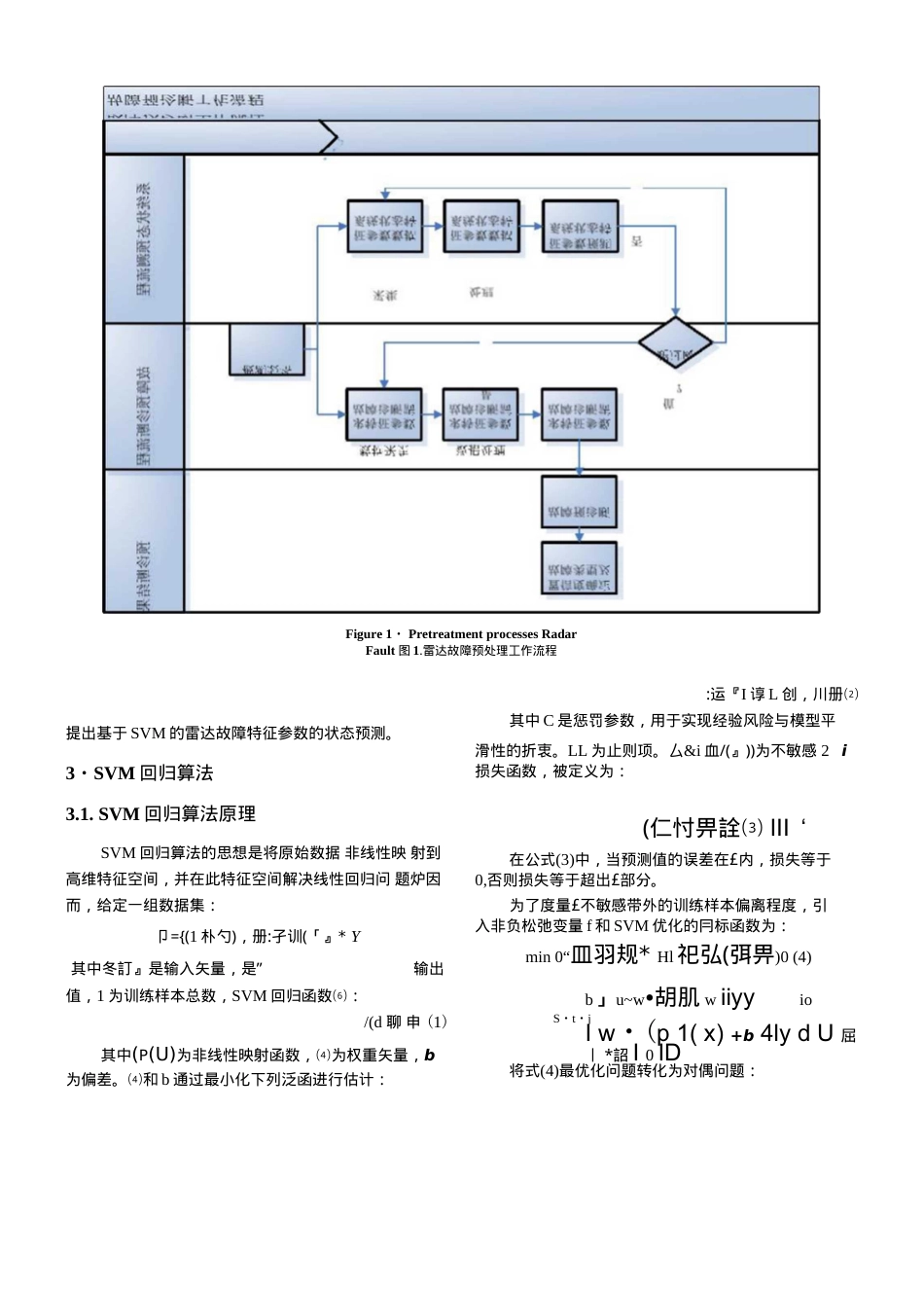
ComputerScienceandApplication计算机科学与应用,2011,1,20-23http://dx.doi.org/10.12677/csa.2011.11005PublishedOnlineJune2011(http://www.hanspub.org/joumal/csa/)ThePre-diagnosisTechnologyResearchonSVM-BasedRadarFaultYusongWangPLAof91763,QinhuangdaoEmail:yunflyer@163.comReceived:Apr.27th,2011;revised:May9th,2011;accepted:May19th,2011.Abstract:ThispaperbringsSupportVectorMachine(SVM)tothepre-diagnosisofradarfault,implementingtheadvancediagnosisofthelatentradarfault.Tosolvetheproblemsbest,suchastheprocessofradarfaultdiagnosiscomplexityandlong-timediagnosis.ThisisduetoSVMcansolvethesmallsample,nonlinearclassificationproblem,whicharethecharacteristicsofthelatentradarfault.Finally,thepaperthroughexamplesfullyillustratesthatthealgorithmhasthecapacityofexcludingtheradarlatentfault.Keywords:SVM;RadarFault;Pre-diagnosis基于SVM的雷达故障预诊断技术研究王玉松海军91763部队,秦皇岛Email:yunflyer@163.com收稿日期:2011年4月270;修回日期:2011年5月90;录用日期:2011年5月19日摘要:本文将支持向量机(SVM)引入雷达故障预诊断,实现了雷达进入潜伏性故障时就提前诊断。很好地解决雷达故障诊断流程复杂、诊断时间长等问题。这是由于SVM可以很好地解决小样本、非线性分类问题,而这正是潜伏性雷达故障的特点。本文最后通过实例充分说明了该算法在排除雷达潜伏性故障方面的能力。关键词:SVM;雷达故障;预诊断HansiXMi1.引言随着新军事变革和军队信息化的发展,各种新体制雷达不断出现,其结构复杂、功能强大、数字化程度越來越高。这在大大增强我军信息化力量的同时,也带来了问题:雷达故障诊断流程复朵、诊断时间长、维修困难、维修费用高;更迫切的一点是如何提高雷达在战争或演练中的可靠性⑴。本文探讨一种基于支持向量机(s叩po"vectormachine)的雷达故障预诊断技术,其基于结构风险最小化原理,很好地解决雷达[2]故障小样本、非线性的分类和回归问题,最后通过实例说明该技术对于潜伏性故障的诊断能力。2.雷达故障预诊断流程本文将雷达故障预诊断分为系统状态预测和故障预处理两部分,其工作流程如图1示,当系统状态特征参数数值超过设定阈值,则进入故障预诊断工作状念。山于雷达故障特征参数的样本数据是在发现系统处于潜伏性异常工作状态时才开始采集,因而获取的训练数据多数为有限的小样本数据⑷。此外,乂因为特征参数数据通常处于非线性的变化状态,为此本文提出基于SVM的雷达故障特征参数的状态预测。3・SVM回归算法3.1.SVM回归算法原理SVM回归算法的思想是将原始数据非线性映射到高维特征空间,并在此特征空间解决线性回归问题炉因而,给定一组数据集:卩={(1朴勺),册:孑训(「』*Y其中冬訂』是输入矢量,是”输出值,1为训练样本总数,SVM回归函数⑹:/(d聊申(1)其中(P(U)为非线性映射函数,⑷为权重矢量,b为偏差。⑷和b通过最小化下列泛函进行估计::运『I谆L创,川册⑵其中C是惩罚参数,用于实现经验风险与模型平滑性的折衷。LL为止则项。厶&i血/(』))为不敏感2i损失函数,被定义为:(仁忖畀詮⑶III‘在公式(3)中,当预测值的误差在£内,损失等于0,否则损失等于超出£部分。为了度量£不敏感带外的训练样本偏离程度,引入非负松弛变量f和SVM优化的冃标函数为:min0“皿羽规*Hl祀弘(弭畀)0(4)b」u~w•胡肌wiiyyioS・t・jIw・(p1(x)+b4lydU屈丨*詔I0ID将式(4)最优化问题转化为对偶问题:Figure1・PretreatmentprocessesRadarFault图1.雷达故障预处理工作流程(86)韵必:(嗣厶*八吃IX(d-d匕-£为,=i(Sl1+1弘)1k工二(恥刨加別丿需其中那,6;、“的数据点为支扌鯛觀1適魅嚨虾隊$癖為钳逋应平面的优化权重矢量,即::**Kx?X*=1£(也疵0(0s.t.I)U⑸*K兀闪回归函数为:f盹別會由以上推理可知通过回归図为击,”(创刘%,血)+b,s=1,2,…/Figure2.SVMalgorithmflowchart图2.SVM算法实现流程图求得仗I劉昴训绳。,从而获得SVM预测模型。即对SVM进4•雷达故障预诊断实例3.2•算法实现故障特征参数的状...