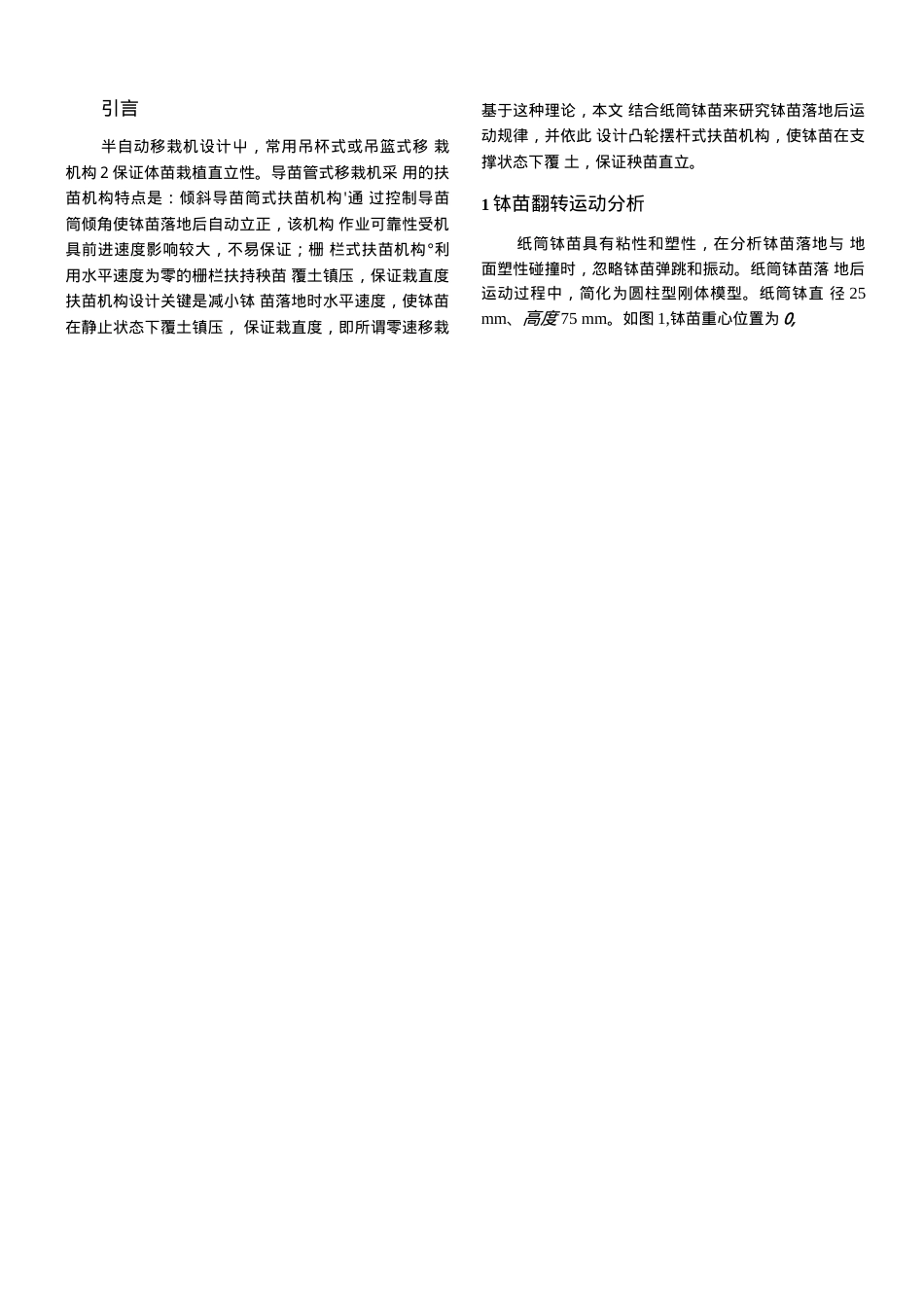
移栽机凸轮摆杆式扶苗机构设计与分析彳周德义孙裕晶马成林【摘要】移栽机扶苗机构结构参数利运动参数设计合理是保证移栽钵苗直立的关键。分析了无扶苗机构时钵苗落地后翻转运动过程,凸轮摆杆式扶苗机构栽植性能与运动参数关系,以及扶苗板运动规律。通过理论分析建立了扶苗板运动规律数学模型和扶苗机构初相角数学模型。设计的凸轮摆杆式扶苗机构己用于2ZB型导苗筒式移栽机匕。试验表明:该机构工作稳定,栽植深度均匀,满足移栽要求。吴键词:移栽机扶苗机构设计试验中图分类号:S223194文献标识码:ADesfenandAnalysisofaSupporthgseedlingMechanismwithCamandCombhedRockerZhouDcyiSunYujingMaChcnglin(JilinUniversity)AbstractSupporting2seedlingmechanwithreasonablesiructuralparametersandmovemenlpanimctcrsisthekeyfortransplantingseedlinguprightly・Themovanentaftertheseedlingfallstothegroundwasanalyzedinthispaper,andtherelationbetweenthetransplantingperfonnanceofthesupporting2seedlingmechanisnanditsparameterswerealsoanalyzedWiththehelpofcomputeranalyzing,thecurvesofdisplacementofsupporting2seedlingboardandthetheoreticaloutlookofthecamweredrawn,“ndthemathanaticalmodeloftheoriginalangleofsupporting2seedlingmechanisnwassetup.Themechanismwasusedin2ZBtransplanter,andwasprovedinexperinentstobesatisfiedofthedemandtotransplantseedIingsKeywordsTransplanters,Supporting2seedlingmechanign,Design,Experinent引言半自动移栽机设计屮,常用吊杯式或吊篮式移栽机构2保证体苗栽植直立性。导苗管式移栽机采用的扶苗机构特点是:倾斜导苗筒式扶苗机构'通过控制导苗筒倾角使钵苗落地后自动立正,该机构作业可靠性受机具前进速度影响较大,不易保证;栅栏式扶苗机构°利用水平速度为零的栅栏扶持秧苗覆土镇压,保证栽直度扶苗机构设计关键是减小钵苗落地时水平速度,使钵苗在静止状态下覆土镇压,保证栽直度,即所谓零速移栽基于这种理论,本文结合纸筒钵苗来研究钵苗落地后运动规律,并依此设计凸轮摆杆式扶苗机构,使钵苗在支撑状态下覆土,保证秧苗直立。1钵苗翻转运动分析纸筒钵苗具有粘性和塑性,在分析钵苗落地与地面塑性碰撞时,忽略钵苗弹跳和振动。纸筒钵苗落地后运动过程中,简化为圆柱型刚体模型。纸筒钵直径25mm、高度75mm。如图1,钵苗重心位置为0,收稿日期:200205-213地面机械仿生技术教育部重点实验室资助项日(项目编号:961065)周德义吉林大学生物与农业工程学院博士,130025长春市孙裕晶吉林大学生物与农业工程学院傅士生马成林吉林大学生物与农业工程学院教授博士生•导师2扶苗机构结构和性能参数在惯性力作用下,无扶苗机构则钵苗落地时将向前倾倒,因此钵苗栽植直立性主耍取决于扶苗机构。理想情况应在钵苗落地瞬间进行扶苗,使钵苗水平速度为零,在支撑条件下覆土而不发生前冲和弹跳。受滑移率、摩擦力等随机因素影响,体苗着地点随机变化,实际上要实现钵苗着地瞬间扶苗是很困难的。若扶苗机构动作超前,则钵苗落到扶苗板上反弹,钵苗向后躺倒;反之扶苗机构动作滞后,由于惯性作用钵苗向前倒伏。设计中按钵苗着地一段时间后扶苗器开始扶持体苗进行趾置,直到覆土完成,然加上秧苗叶质M,测得重心咼度为45mm。图I钵苗翻转运动模型因移栽作业速度较低且比较稳定,为便于分析,后镇压完成栽植过程。设移栽机以速度皿匀速前进。在惯性力作用下,钵苗绕A点作平面定轴转动。质心回转半径为RC0A=4617mm。下面分析不扶苗时,纸筒钵苗落地后运动过程。在重力作用下,钵苗力学平衡方程为m/?^H=mgRisin(HH)初始条件为:初相角H=arctan151524°45初始角速度H=arctanAI0整理可得^(sinHosH-cosHinH)(F^O:10515°J)(1)令H3t,L(H二/<'G)o对方程两边取拉氏变换,并将初始条件代入式(1)得RiL(H=g[cosHL(sin(Er))-sinHL(cos(Er))]按拉氏变换展开可得RI[S2FG)・SH-H=00sHsinHTT5—k$+二$+9计cosH諾丽sinH5(AE2)-对式(2)进行拉氏逆变换倉cosH[Er-sin(Er)・sinH丄]•E?其中“(/)为阶跃函数,因Q0,有«(/)=lo将“(r)二1代入式(3),得钵苗...